An Offline Adaptation Framework for Constrained Multi-Objective Reinforcement Learning
{kind=link}
Abstract
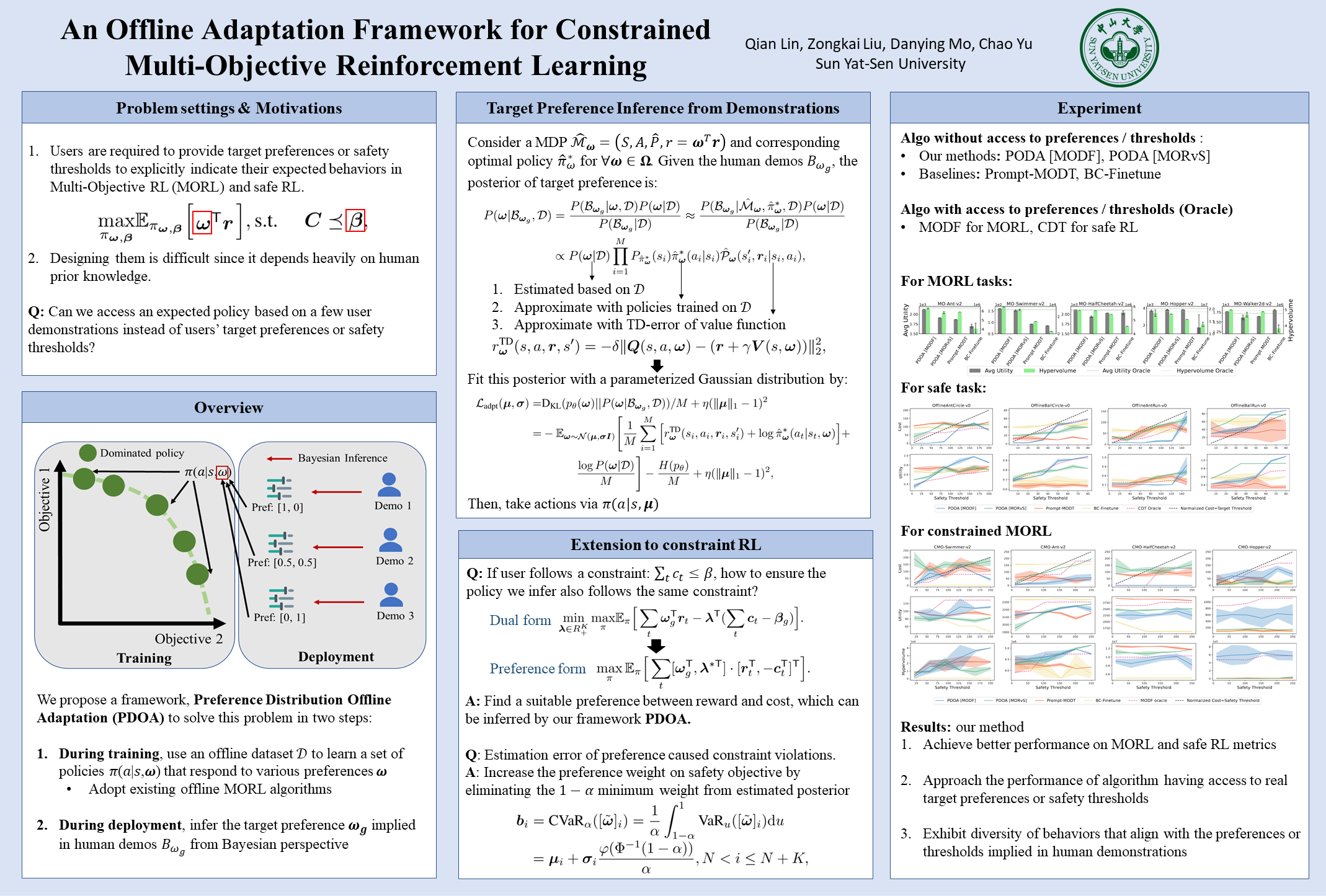
In recent years, significant progress has been made in multi-objective reinforcement learning (RL) research, which aims to balance multiple objectives by incorporating preferences for each objective. In most existing studies, specific preferences must be provided during deployment to indicate the desired policies explicitly. However, designing these preferences depends heavily on human prior knowledge, which is typically obtained through extensive observation of high-performing demonstrations with expected behaviors. In this work, we propose a simple yet effective offline adaptation framework for multi-objective RL problems without assuming handcrafted target preferences, but only given several demonstrations to implicitly indicate the preferences of expected policies. Additionally, we demonstrate that our framework can naturally be extended to meet constraints on safety-critical objectives by utilizing safe demonstrations, even when the safety thresholds are unknown. Empirical results on offline multi-objective and safe tasks demonstrate the capability of our framework to infer policies that align with real preferences while meeting the constraints implied by the provided demonstrations.