Efficient and Sharp Off-Policy Evaluation in Robust Markov Decision Processes
{kind=link}
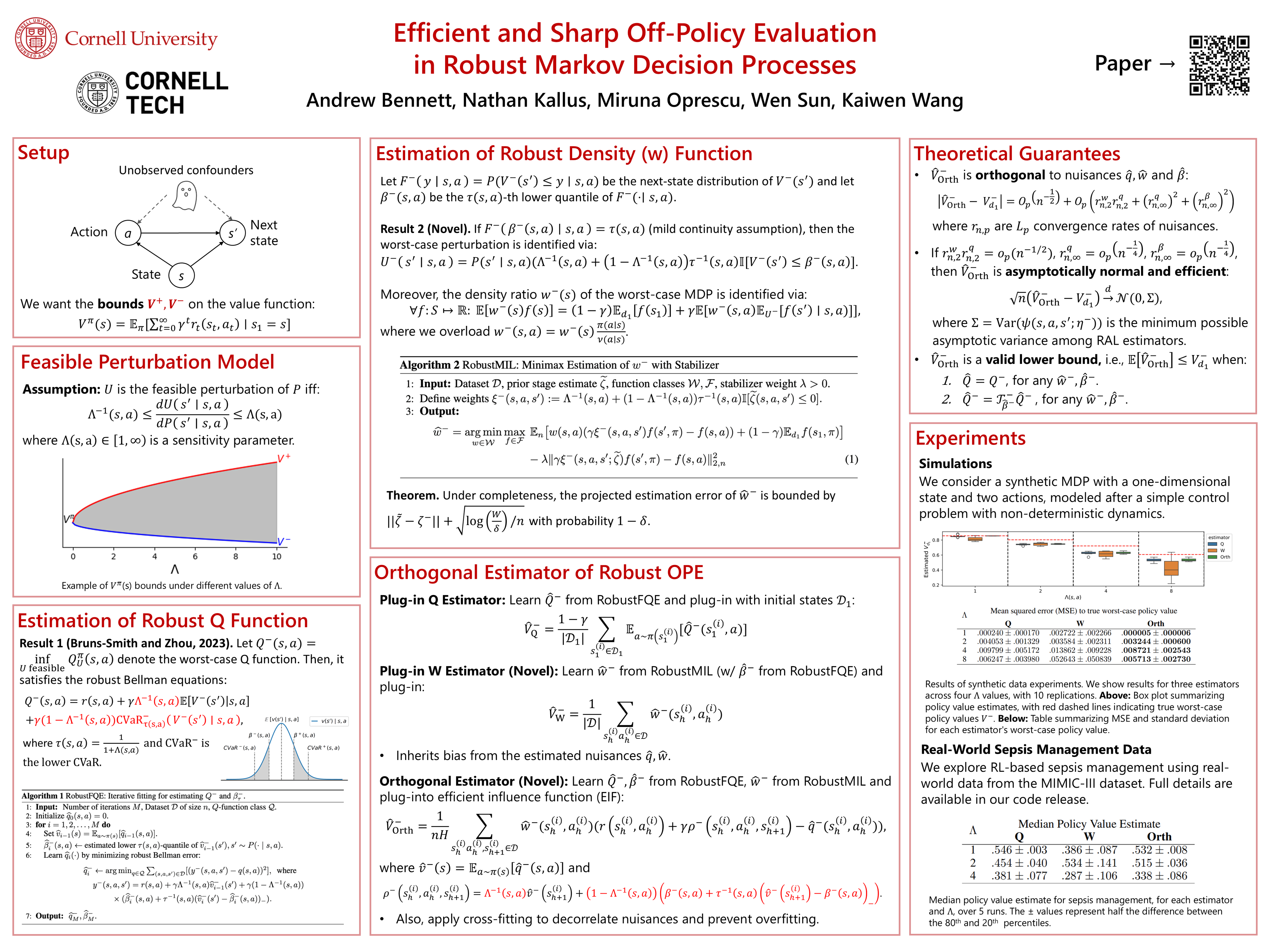
Abstract
We study the evaluation of a policy under best- and worst-case perturbations to a Markov decision process (MDP), using transition observations from the original MDP, whether they are generated under the same or a different policy. This is an important problem when there is the possibility of a shift between historical and future environments, \emph{e.g.} due to unmeasured confounding, distributional shift, or an adversarial environment. We propose a perturbation model that allows changes in the transition kernel densities up to a given multiplicative factor or its reciprocal, extending the classic marginal sensitivity model (MSM) for single time-step decision-making to infinite-horizon RL. We characterize the sharp bounds on policy value under this model -- \emph{i.e.}, the tightest possible bounds based on transition observations from the original MDP -- and we study the estimation of these bounds from such transition observations. We develop an estimator with several important guarantees: it is semiparametrically efficient, and remains so even when certain necessary nuisance functions, such as worst-case Q-functions, are estimated at slow, nonparametric rates. Our estimator is also asymptotically normal, enabling straightforward statistical inference using Wald confidence intervals. Moreover, when certain nuisances are estimated inconsistently, the estimator still provides valid, albeit possibly not sharp, bounds on the policy value. We validate these properties in numerical simulations. The combination of accounting for environment shifts from train to test (robustness), being insensitive to nuisance-function estimation (orthogonality), and addressing the challenge of learning from finite samples (inference) together leads to credible and reliable policy evaluation.