RoboMamba: Efficient Vision-Language-Action Model for Robotic Reasoning and Manipulation
{kind=link}
Abstract
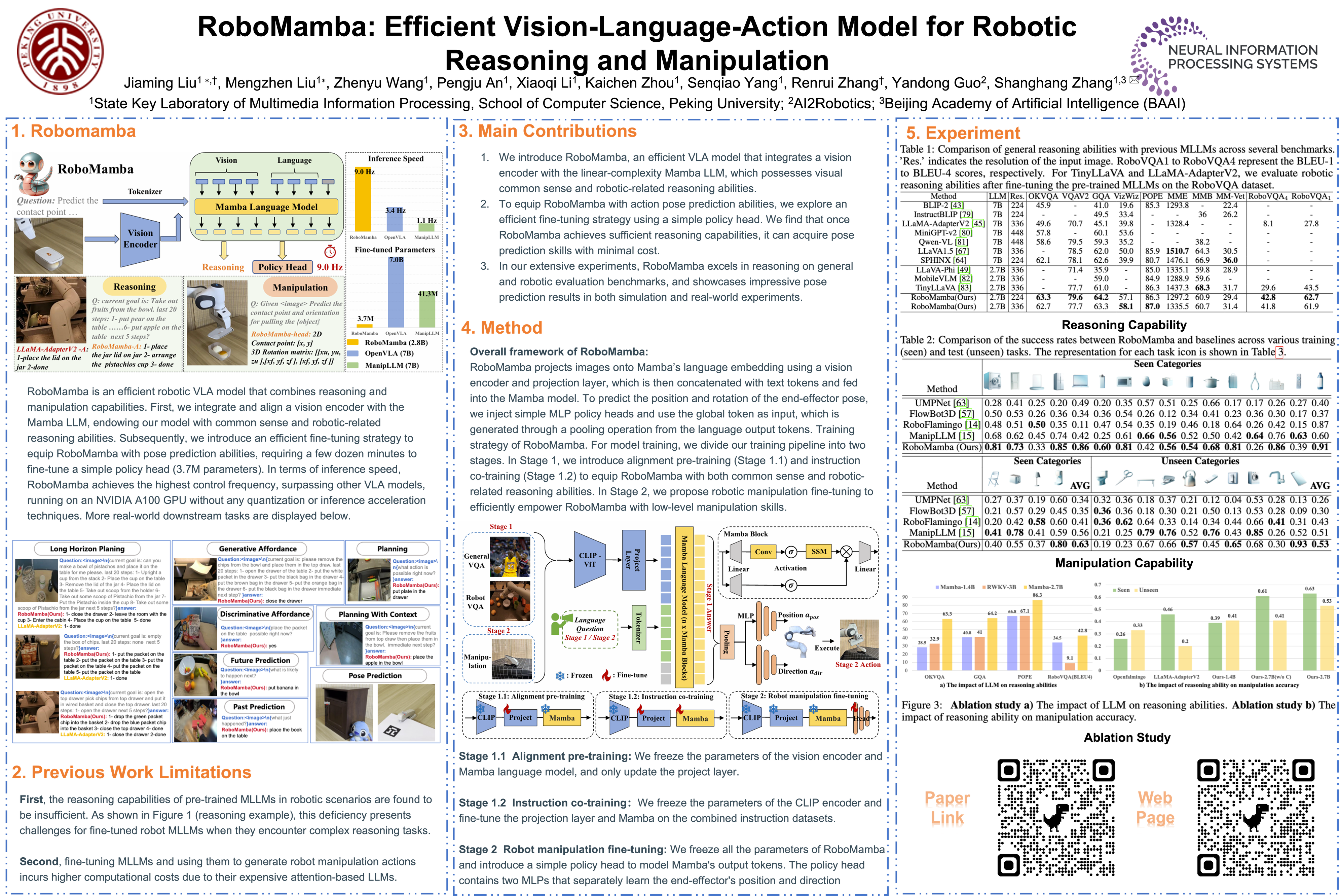
A fundamental objective in robot manipulation is to enable models to comprehend visual scenes and execute actions. Although existing Vision-Language-Action (VLA) models for robots can handle a range of basic tasks, they still face challenges in two areas: (1) insufficient reasoning ability to tackle complex tasks, and (2) high computational costs for VLA model fine-tuning and inference. The recently proposed state space model (SSM) known as Mamba demonstrates promising capabilities in non-trivial sequence modeling with linear inference complexity. Inspired by this, we introduce RoboMamba, an end-to-end robotic VLA model that leverages Mamba to deliver both robotic reasoning and action capabilities, while maintaining efficient fine-tuning and inference. Specifically, we first integrate the vision encoder with Mamba, aligning visual tokens with language embedding through co-training, empowering our model with visual common sense and robotic-related reasoning. To further equip RoboMamba with SE(3) pose prediction abilities, we explore an efficient fine-tuning strategy with a simple policy head. We find that once RoboMamba possesses sufficient reasoning capability, it can acquire manipulation skills with minimal fine-tuning parameters (0.1\% of the model) and time. In experiments, RoboMamba demonstrates outstanding reasoning capabilities on general and robotic evaluation benchmarks. Meanwhile, our model showcases impressive pose prediction results in both simulation and real-world experiments, achieving inference speeds 3 times faster than existing VLA models.