CRT-Fusion: Camera, Radar, Temporal Fusion Using Motion Information for 3D Object Detection
{kind=link}
Abstract
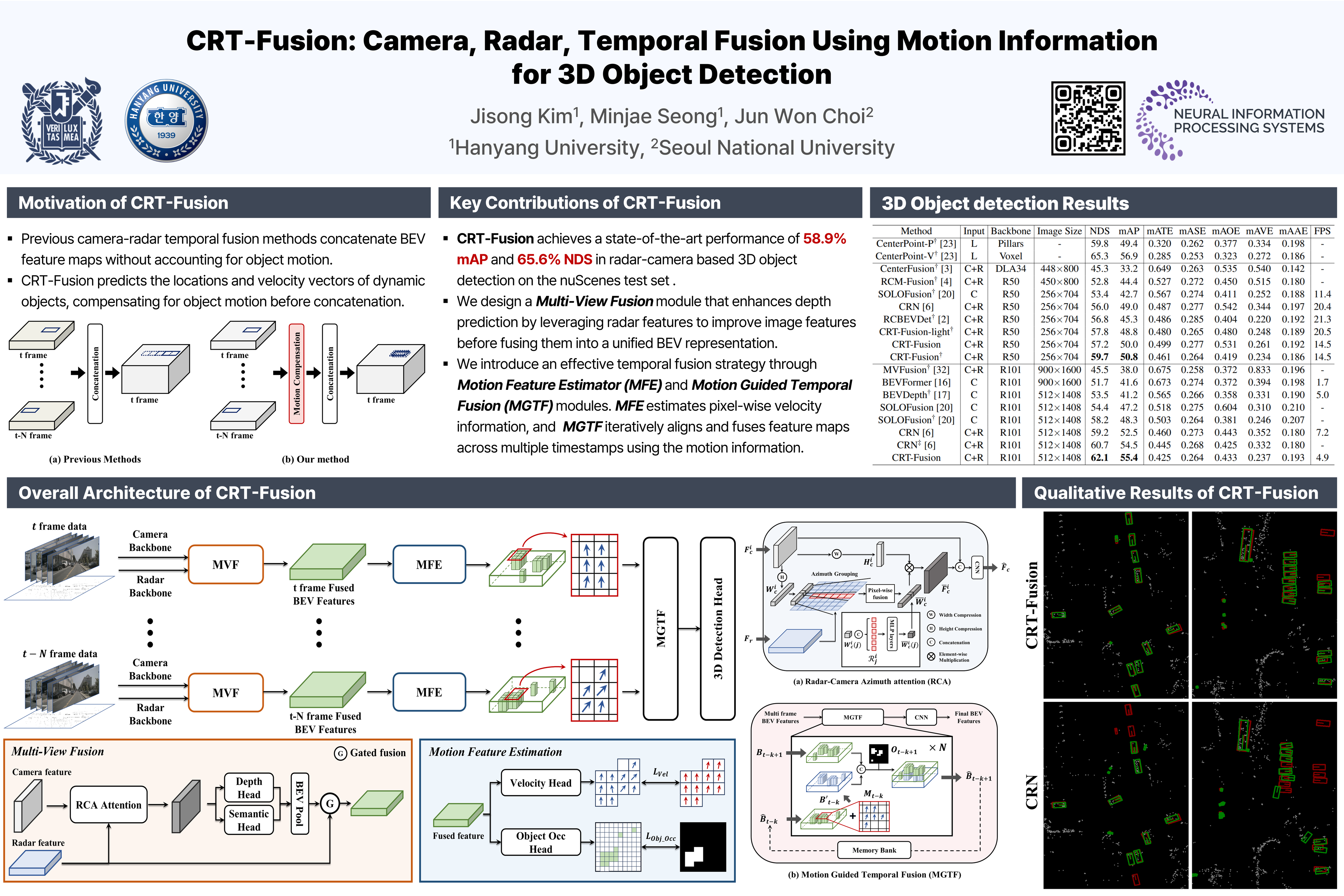
Accurate and robust 3D object detection is a critical component in autonomous vehicles and robotics. While recent radar-camera fusion methods have made significant progress by fusing information in the bird's-eye view (BEV) representation, they often struggle to effectively capture the motion of dynamic objects, leading to limited performance in real-world scenarios. In this paper, we introduce CRT-Fusion, a novel framework that integrates temporal information into radar-camera fusion to address this challenge. Our approach comprises three key modules: Multi-View Fusion (MVF), Motion Feature Estimator (MFE), and Motion Guided Temporal Fusion (MGTF). The MVF module fuses radar and image features within both the camera view and bird's-eye view, thereby generating a more precise unified BEV representation. The MFE module conducts two simultaneous tasks: estimation of pixel-wise velocity information and BEV segmentation. Based on the velocity and the occupancy score map obtained from the MFE module, the MGTF module aligns and fuses feature maps across multiple timestamps in a recurrent manner. By considering the motion of dynamic objects, CRT-Fusion can produce robust BEV feature maps, thereby improving detection accuracy and robustness. Extensive evaluations on the challenging nuScenes dataset demonstrate that CRT-Fusion achieves state-of-the-art performance for radar-camera-based 3D object detection. Our approach outperforms the previous best method in terms of NDS by +1.7%, while also surpassing the leading approach in mAP by +1.4%. These significant improvements in both metrics showcase the effectiveness of our proposed fusion strategy in enhancing the reliability and accuracy of 3D object detection.