Learning Distinguishable Trajectory Representation with Contrastive Loss
{kind=link}
Abstract
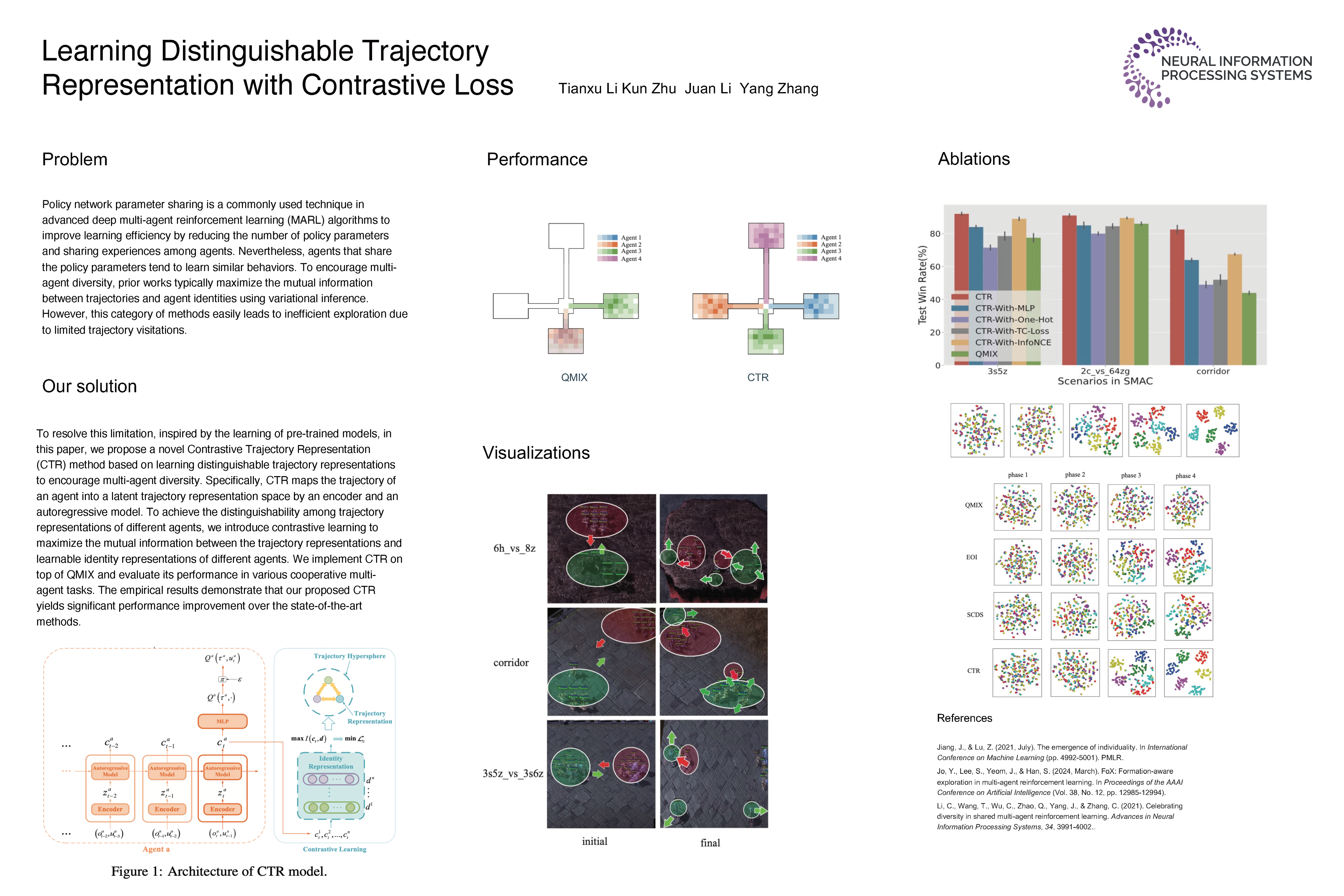
Policy network parameter sharing is a commonly used technique in advanced deep multi-agent reinforcement learning (MARL) algorithms to improve learning efficiency by reducing the number of policy parameters and sharing experiences among agents. Nevertheless, agents that share the policy parameters tend to learn similar behaviors. To encourage multi-agent diversity, prior works typically maximize the mutual information between trajectories and agent identities using variational inference. However, this category of methods easily leads to inefficient exploration due to limited trajectory visitations. To resolve this limitation, inspired by the learning of pre-trained models, in this paper, we propose a novel Contrastive Trajectory Representation (CTR) method based on learning distinguishable trajectory representations to encourage multi-agent diversity. Specifically, CTR maps the trajectory of an agent into a latent trajectory representation space by an encoder and an autoregressive model. To achieve the distinguishability among trajectory representations of different agents, we introduce contrastive learning to maximize the mutual information between the trajectory representations and learnable identity representations of different agents. We implement CTR on top of QMIX and evaluate its performance in various cooperative multi-agent tasks. The empirical results demonstrate that our proposed CTR yields significant performance improvement over the state-of-the-art methods.