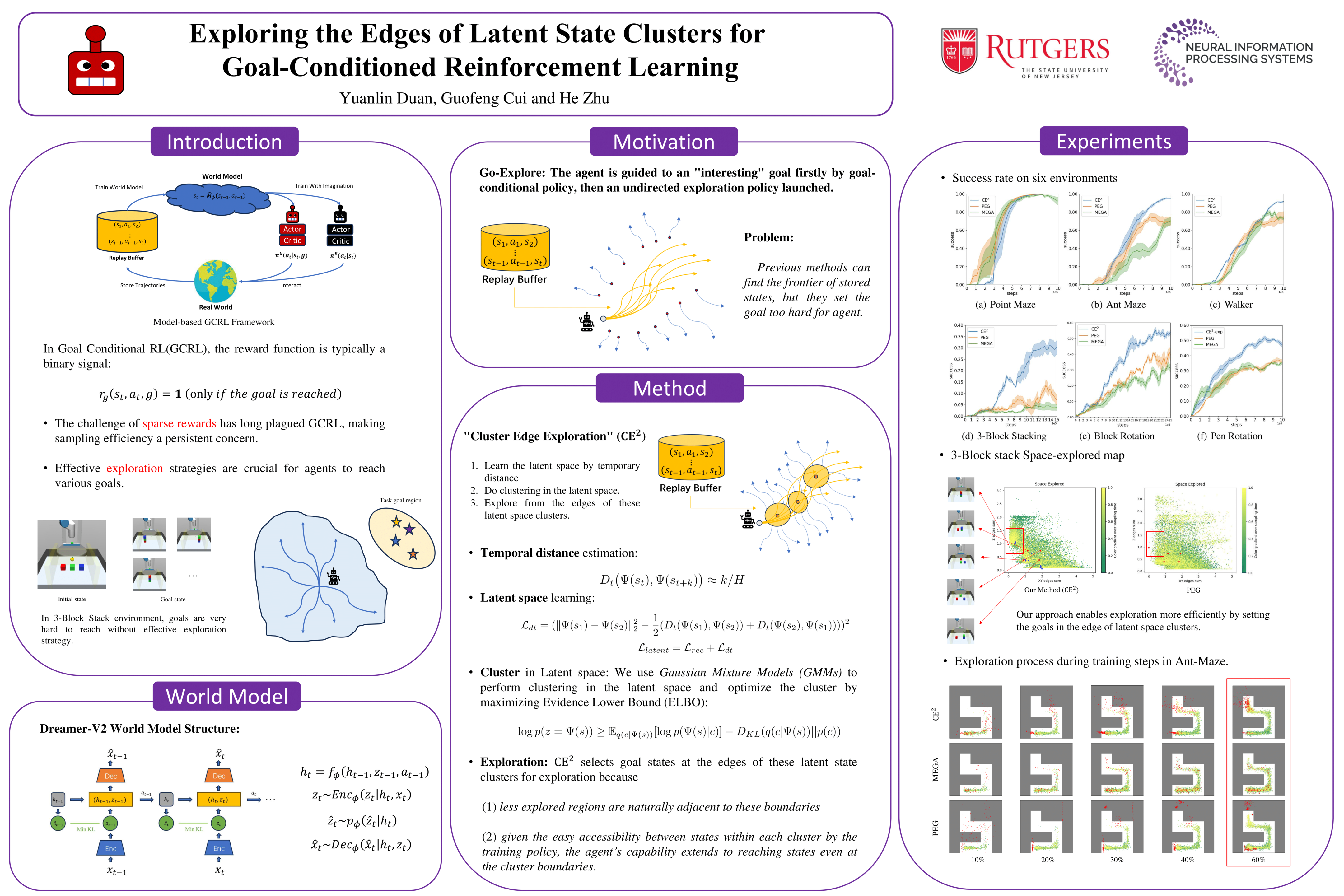
Exploring the Edges of Latent State Clusters for Goal-Conditioned Reinforcement Learning
Yuanlin Duan ⋅ Guofeng Cui ⋅ He Zhu
2024 Poster
{kind=link}
Abstract
Exploring unknown environments efficiently is a fundamental challenge in unsupervised goal-conditioned reinforcement learning. While selecting exploratory goals at the frontier of previously explored states is an effective strategy, the policy during training may still have limited capability of reaching rare goals on the frontier, resulting in reduced exploratory behavior. We propose "Cluster Edge Exploration" (CE$^2$), a new goal-directed exploration algorithm that when choosing goals in sparsely explored areas of the state space gives priority to goal states that remain accessible to the agent. The key idea is clustering to group states that are easily reachable from one another by the current policy under training in a latent space, and traversing to states holding significant exploration potential on the boundary of these clusters before doing exploratory behavior. In challenging robotics environments including navigating a maze with a multi-legged ant robot, manipulating objects with a robot arm on a cluttered tabletop, and rotating objects in the palm of an anthropomorphic robotic hand, CE$^2$ demonstrates superior efficiency in exploration compared to baseline methods and ablations.
Video
Chat is not available.
Successful Page Load