Offline Model-Based Reinforcement Learning for Tokamak Control
Ian Char ⋅ Joseph Abbate ⋅ Laszlo Bardoczi ⋅ Mark Boyer ⋅ Youngseog Chung ⋅ Rory Conlin ⋅ Keith Erickson ⋅ Viraj Mehta ⋅ Nathan Richner ⋅ Egemen Kolemen ⋅ Jeff Schneider
{kind=link}
Abstract
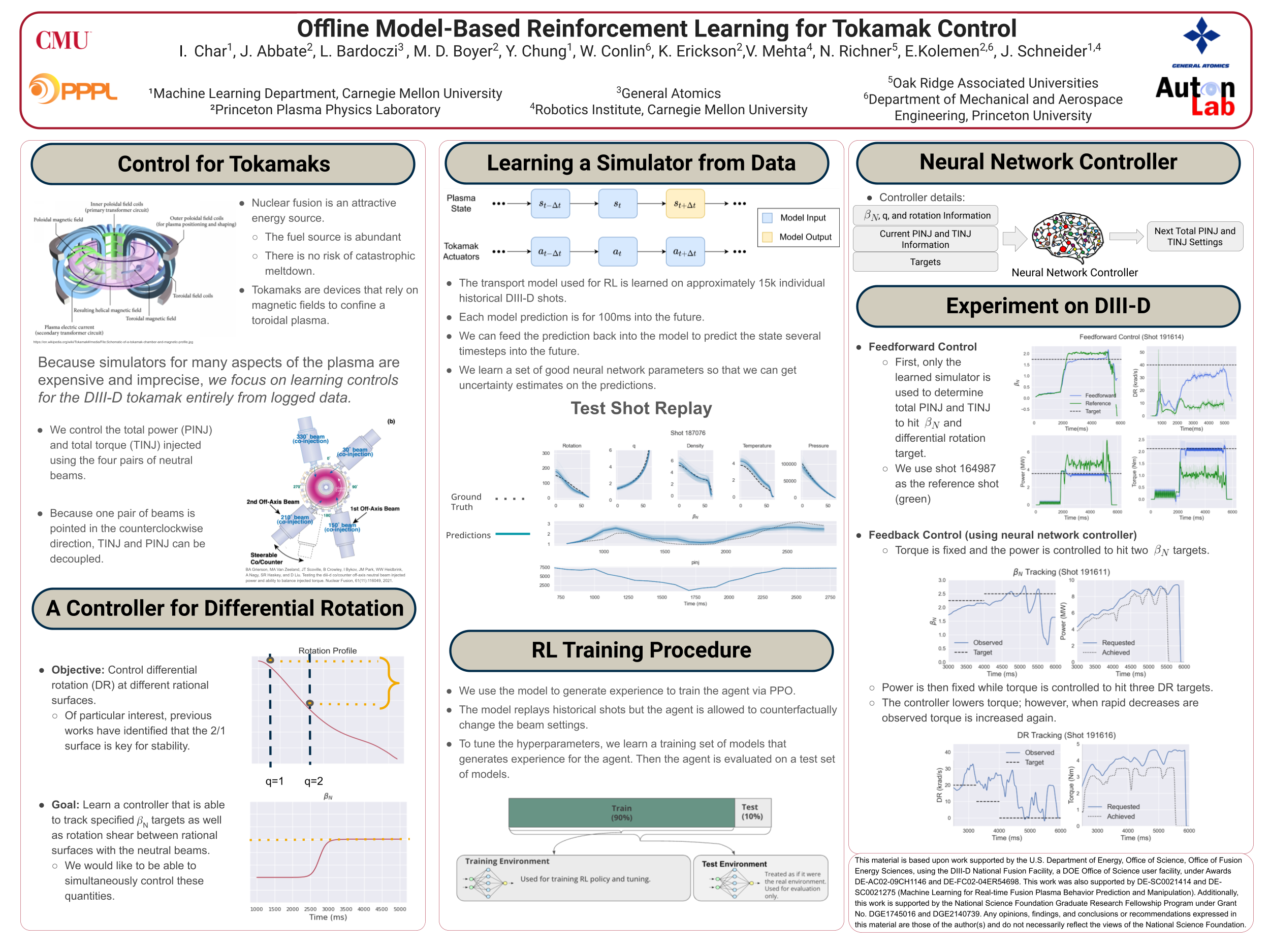
Unlocking the potential of nuclear fusion as an energy source would have profound impacts on the world. Nuclear fusion is an attractive energy source since the fuel is abundant, there is no risk of meltdown, and there are no high-level radioactive byproducts \citep{walker2020introduction}. Perhaps the most promising technology for harnessing nuclear fusion as a power source is the tokamak: a device that relies on magnetic fields to confine a torus shaped plasma. While strides are being made to prove that net energy output is possible with tokamaks \citep{meade200950}, there are still crucial control challenges that exist with these devices \citep{humphreys2015novel}. In this work, we focus on learning controls via offline model-based reinforcement learning for DIII-D, a device operated by General Atomics in San Diego, California. This device has been in operation since 1986, during which there have been over one hundred thousand ``shots'' (runs of the device). We use approximately 15k shots to learn a dynamics model that can predict the evolution of the plasma subject to different actuator settings. This dynamics model can then be used as a simulator that generates experience for the reinforcement learning algorithm to train on. We apply this method to train a controller that uses DIII-D's eight neutral beams to achieve desired $\beta_N$ (the normalized ratio between plasma pressure and magnetic pressure) and differential rotation targets. This controller was then evaluated on the DIII-D device. This work marks one of the first efforts for doing feedback control on a tokamak via a reinforcement learning agent that was trained on historical data alone.
Chat is not available.
Successful Page Load