Can we explain Aha! moments in artificial agents ?
{kind=link}
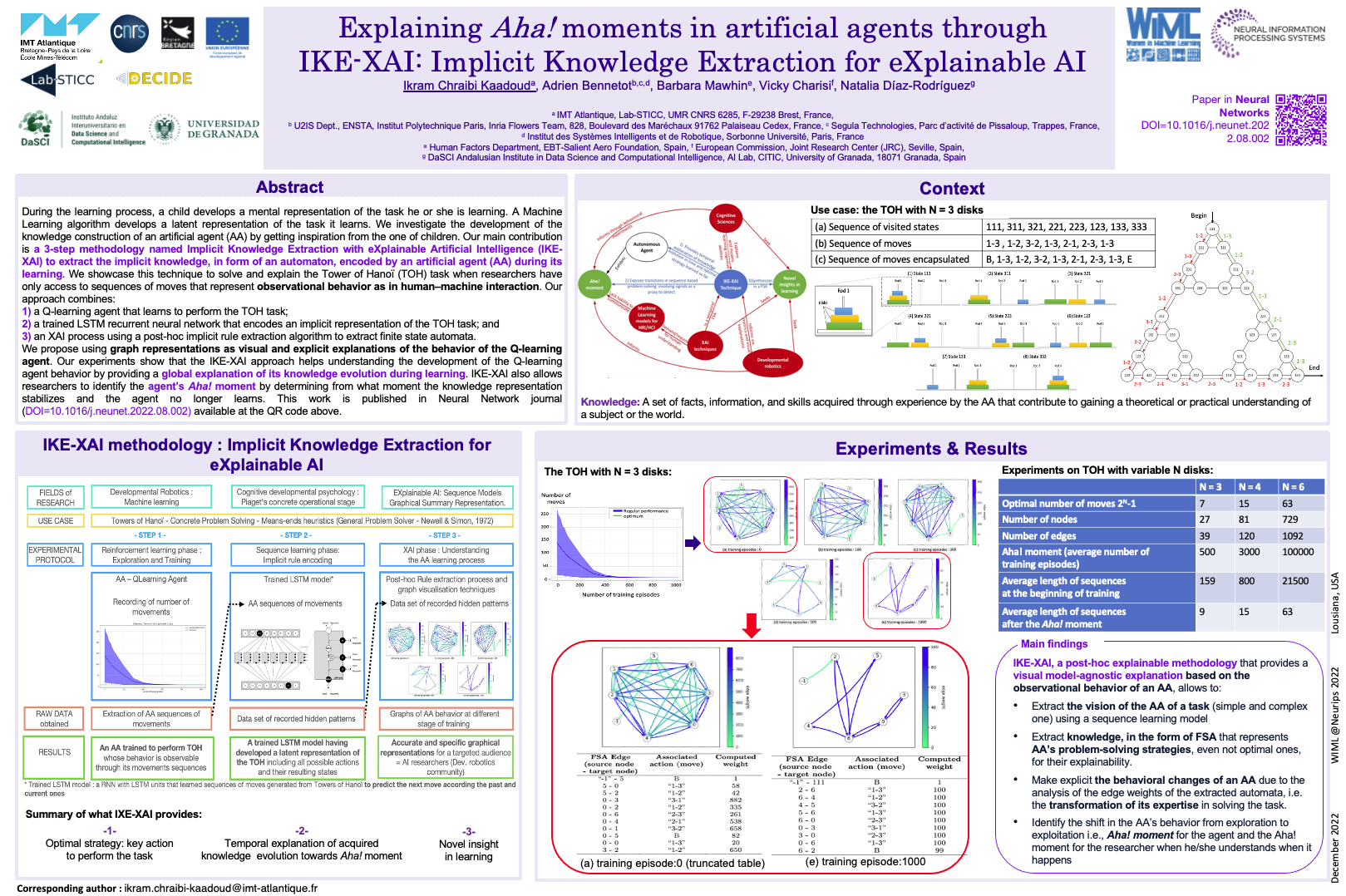
Abstract
During the learning process, a child develops a mental representation of the task he or she is learning. A Machine Learning algorithm develops also a latent representation of the task it learns. We investigate the development of the knowledge construction of an artificial agent through the analysis of its behavior, i.e., its sequences of moves while learning to perform the Tower of Hanoï(TOH) task. We position ourselves in the field of explainable reinforcement learning for developmental robotics, at the crossroads of cognitive modeling and explainable AI. Our main contribution proposes a 3-step methodology named Implicit Knowledge Extraction with eXplainable Artificial Intelligence (IKE-XAI) to extract the implicit knowledge, in form of an automaton, encoded by an artificial agent during its learning. We showcase this technique to solve and explain the TOH task when researchers have only access to moves that represent observational behavior as in human-machine interaction. Therefore, to extract the agent acquired knowledge at different stages of its training, our approach combines: first, a Q-learning agent that learns to perform the TOH task; second, a trained recurrent neural network that encodes an implicit representation of the TOH task; and third, an XAI process using a post-hoc implicit rule extraction algorithm to extract finite state automata. We propose using graph representations as visual and explicit explanations of the behavior of the Q-learning agent. Our experiments show that the IKE-XAI approach helps understanding the development of the Q-learning agent behavior by providing a global explanation of its knowledge evolution during learning. IKE-XAI also allows researchers to identify the agent’s Aha! moment by determining from what moment the knowledge representation stabilizes and the agent no longer learns.