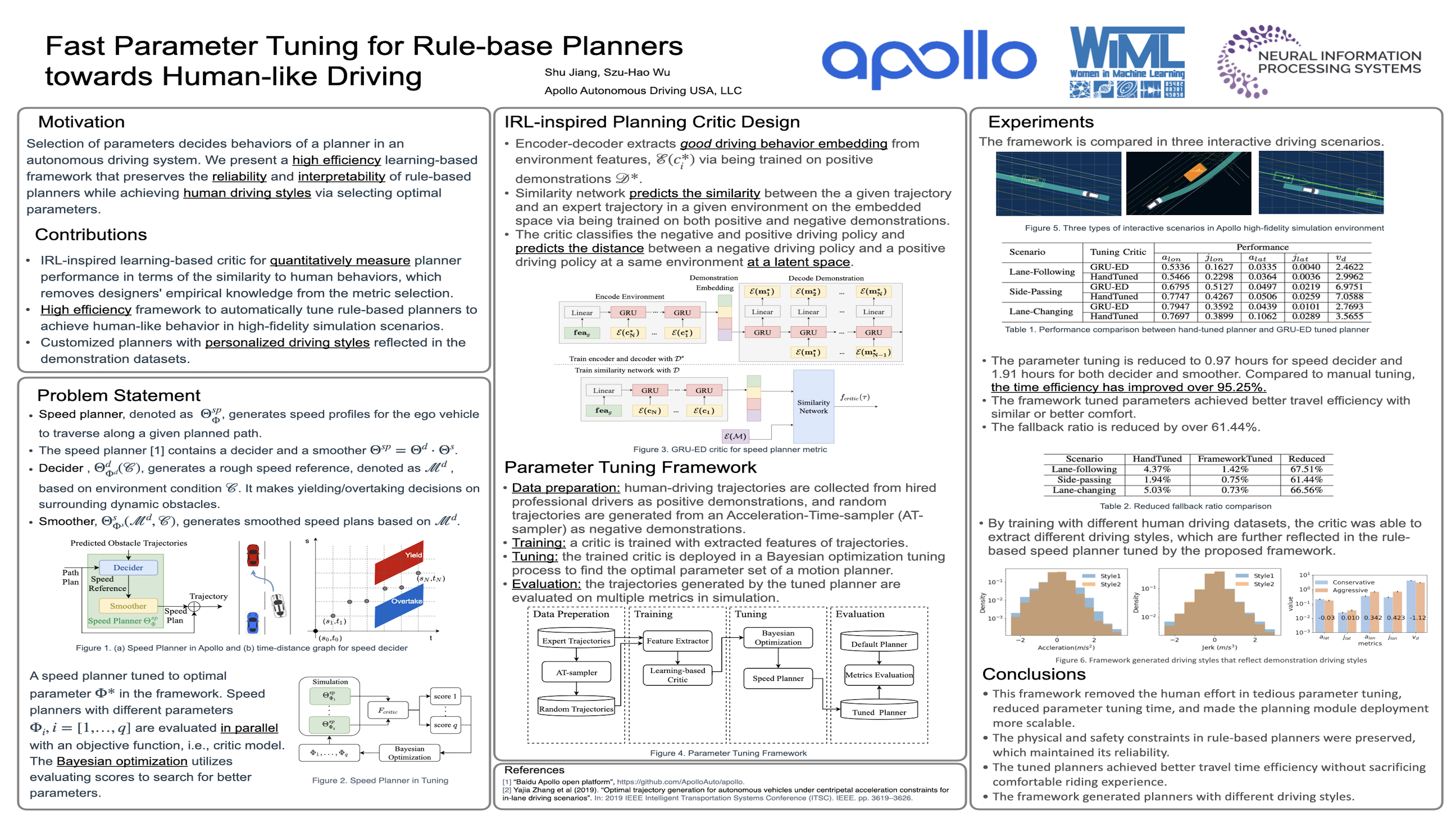
Fast Parameter Tuning for Rule-base Planners towards Human-like Driving
{kind=link}
Abstract
Selection of parameters decides behaviors of a planner in an autonomous driving system. This paper presents a learning-based framework that preserves the reliability and interpretability of rule-based planners while achieving human driving styles via selecting optimal parameters.The framework optimizes parameters of a planner to minimize the difference between human driving plans and autonomous driving plans. The difference is measured by a critic derived from human driving demonstrations via an inverse reinforcement learning inspired method. The automatically tuned planner achieves human-like balance between fast and comfort driving experiences compared to empirical parameters. The parameter tuning time is reduced by 95.25% on a parallel computing architecture compared to that of manual tuning. The merits on the learning-based critic for human-like driving and the extremely high efficiency allow the large-scale deployment of rule-based planners in autonomous driving.