Latent GP-ODEs with Informative Priors
{kind=link}
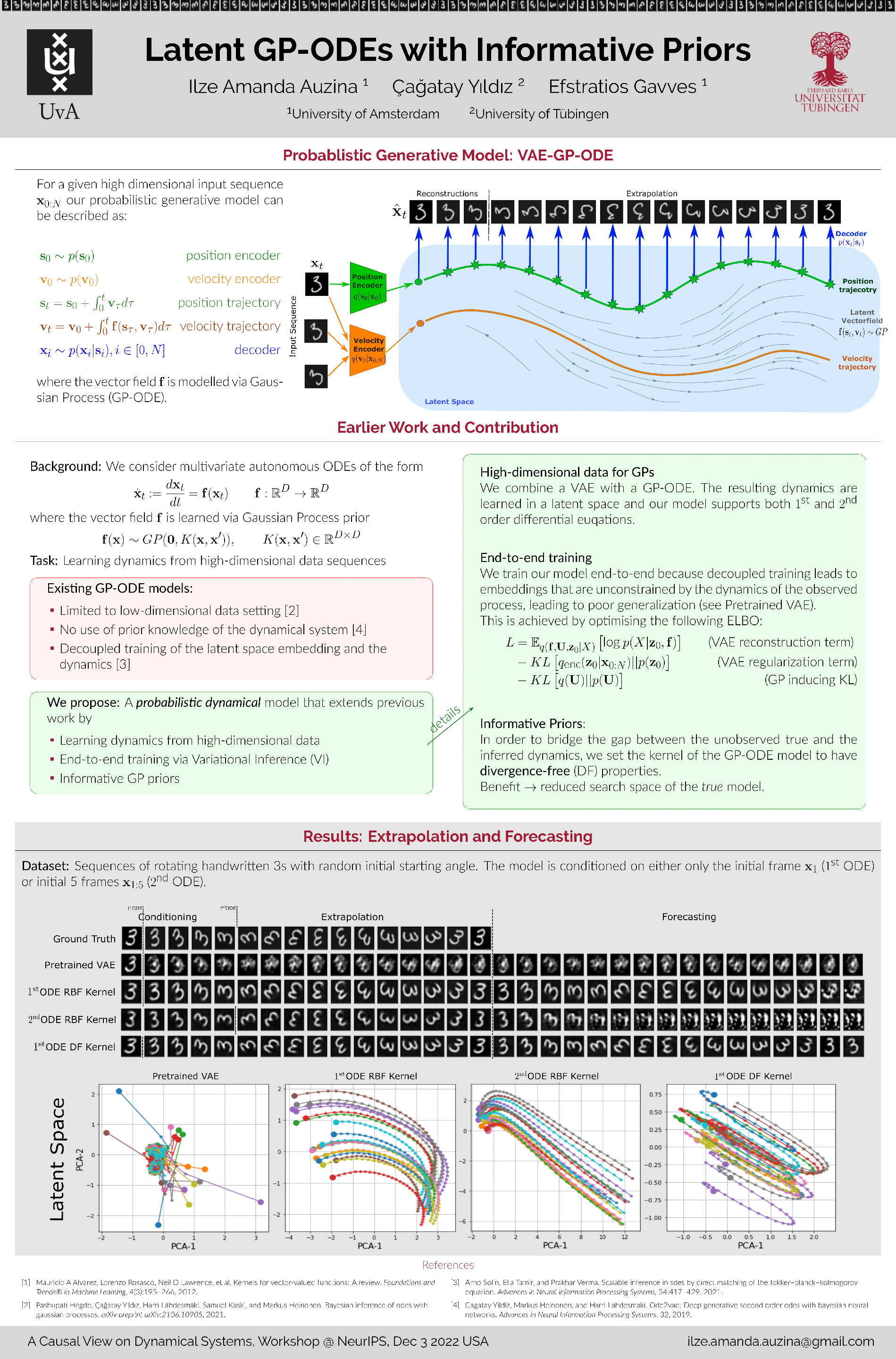
Abstract
For many complex systems the parametric form of the differential equation might be unknown or infeasible to determine. Earlier works have explored to model the unknown ODE system with a Gaussian Process model, however, the application has been limited to a low dimensional data setting. We propose a novel framework by combining a generative and a Bayesian nonparametric model. Our model learns a physically meaningful latent representation (position, momentum) and solves in the latent space an ODE system. The use of GP allows us to account for uncertainty as well as to extend our work with informative priors. We demonstrate our framework on an image rotation dataset. The method demonstrates its ability to learn dynamics from high dimensional data and we obtain state-of-the-art performance compared to earlier GP-based ODEs models on dynamic forecasting.