Improving Motion Forecasting for Autonomous Driving with the Cycle Consistency Loss
{kind=link}
Abstract
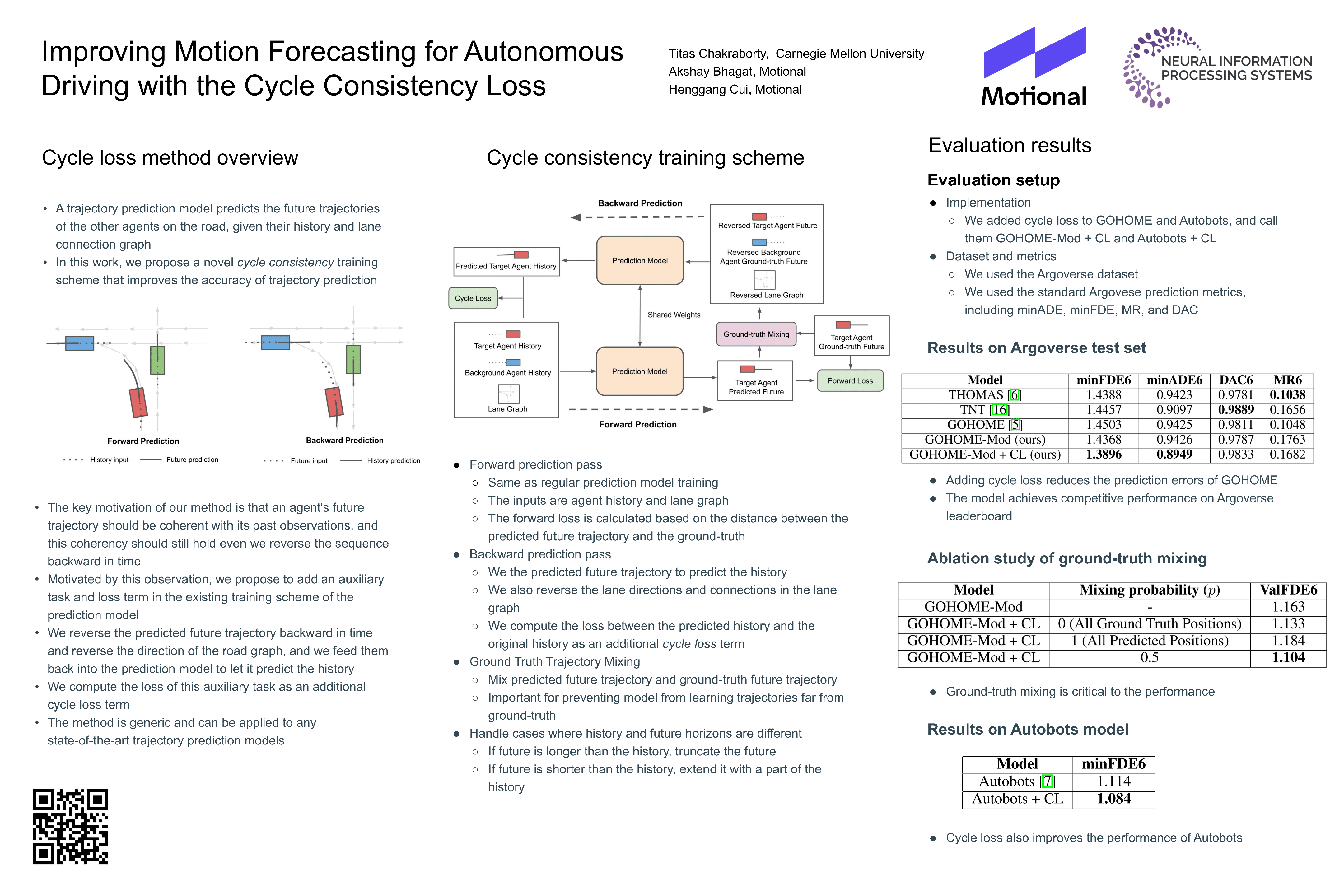
Robust motion forecasting of the dynamic scene is a critical component of an autonomous vehicle. It is a challenging problem due to the heterogeneity in the scene and the inherent uncertainties in the problem. To improve the accuracy of motion forecasting, in this work, we identify a new consistency constraint in this task, that is an agent's future trajectory should be coherent with its history observations and visa versa. To leverage this property, we propose a novel cycle consistency training scheme and define a novel cycle loss to encourage this consistency. In particular, we reverse the predicted future trajectory backward in time and feed it back into the prediction model to predict the history and compute the loss as an additional cycle loss term. Through our experiments on the Argoverse dataset, we demonstrate that cycle loss can improve the performance of competitive motion forecasting models.