Stress-Testing Point Cloud Registration on Automotive LiDAR
{kind=link}
Abstract
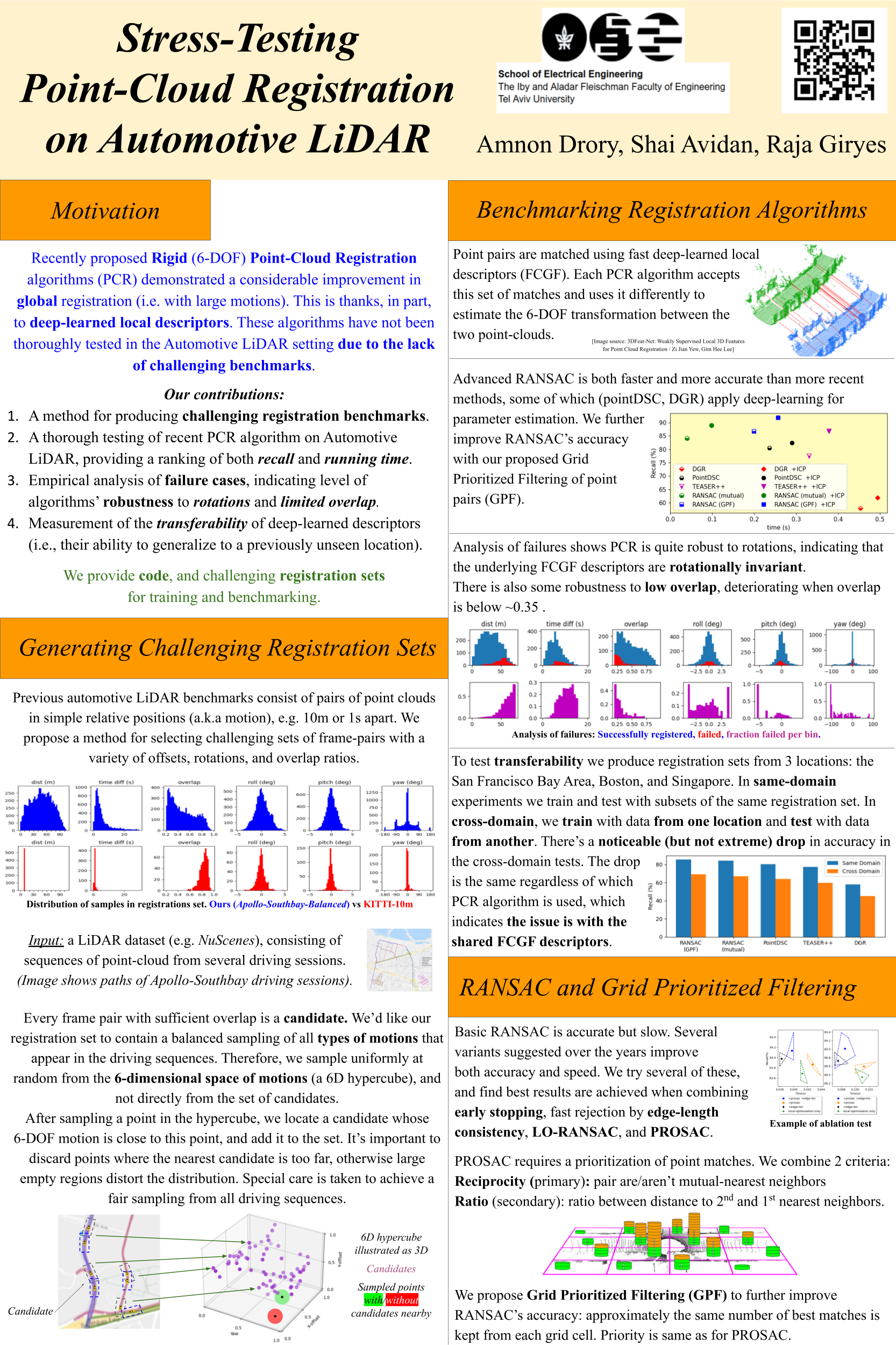
Rigid Point Cloud Registration (PCR) algorithms aim to estimate the 6-DOF relative motion between two point clouds, which is important in various fields, including autonomous driving. Recent years have seen a significant improvement in \emph{global} PCR algorithms, \ie algorithms that can handle a large relative motion. This has been demonstrated in various scenarios, including indoor scenes, but has only been minimally tested in the Automotive setting, where point clouds are produced by vehicle-mounted LiDAR sensors. In this work, we aim to answer questions that are important for automotive applications, including: which of the new algorithms is the most accurate, and which is fastest? How transferable are deep-learning approaches, \eg what happens when you train a network with data from Boston, and run it in a vehicle in Singapore? How small can the overlap between point clouds be before the algorithms start to deteriorate? To what extent are the algorithms rotation invariant? Our results are at times surprising. When comparing robust parameter estimation methods for registration, we find that the fastest and most accurate is not one of the newest approaches. Instead, it is a modern variant of the well known RANSAC technique. We also suggest a new outlier filtering method, Grid-Prioritized Filtering (GPF), to further improve it. An additional contribution of this work is an algorithm for selecting challenging sets of frame-pairs from automotive LiDAR datasets. This enables meaningful benchmarking in the Automotive LiDAR setting, and can also improve training for learning algorithms.