Direct LiDAR-based object detector training from automated 2D detections
{kind=link}
Abstract
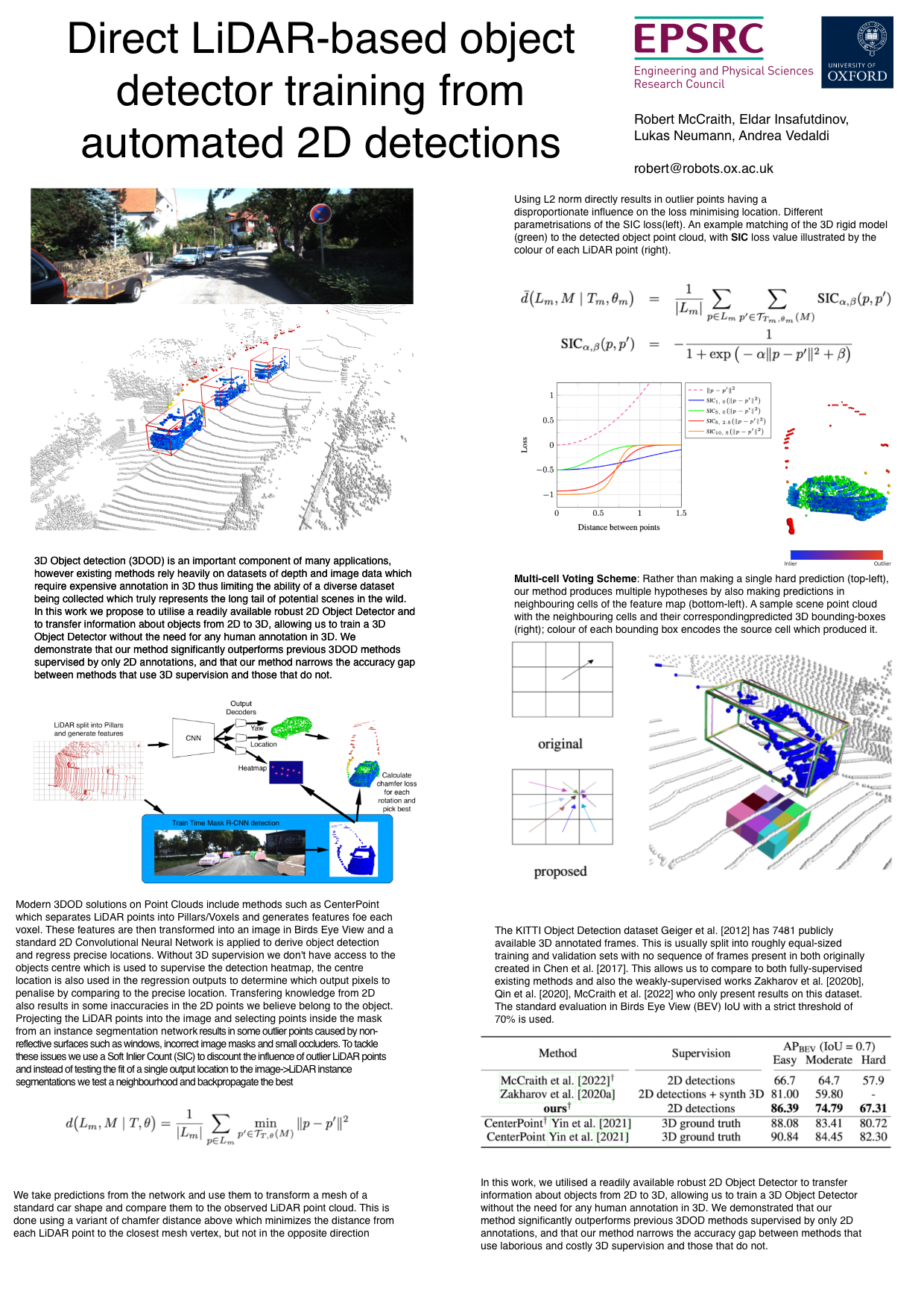
3D Object detection (3DOD) is an important component of many applications, however existing methods rely heavily on datasets of depth and image data which require expensive annotation in 3D thus limiting the ability of a diverse dataset being collected which truly represents the long tail of potential scenes in the wild.In this work we propose to utilise a readily available robust 2D Object Detector and to transfer information about objects from 2D to 3D, allowing us to train a 3D Object Detector without the need for any human annotation in 3D. We demonstrate that our method significantly outperforms previous 3DOD methods supervised by only 2D annotations, and that our method narrows the accuracy gap between methods that use 3D supervision and those that do not.