Conformal Semantic Keypoint Detection with Statistical Guarantees
{kind=link}
Abstract
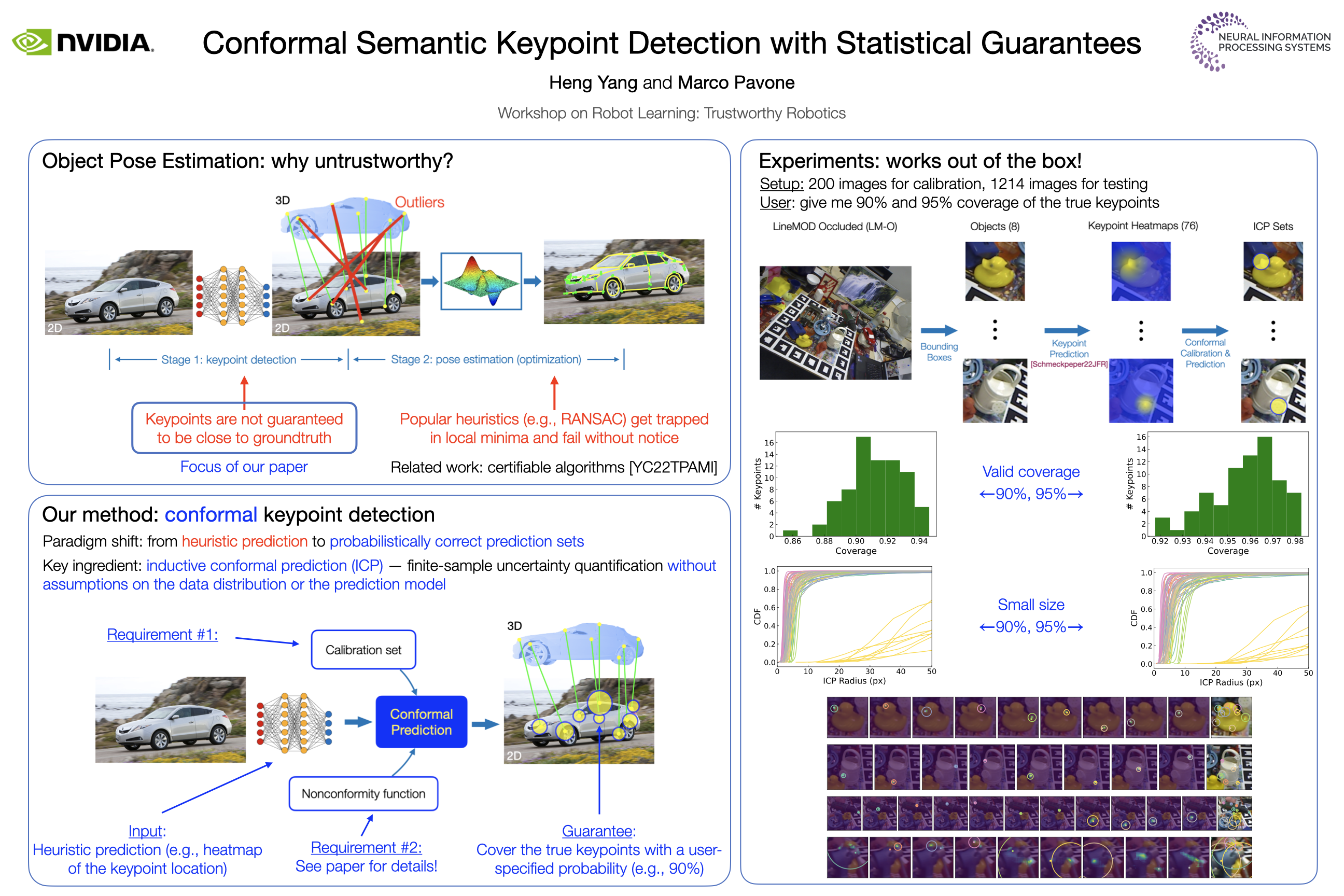
Detecting semantic keypoints is a critical intermediate task for object detection and pose estimation from images. Existing approaches, albeit performing well on standard benchmarks, offer no provable guarantees on the quality of the detection. In this paper, we apply the statistical machinery of inductive conformal prediction that, given a calibration dataset (e.g., 200 images) and a nonconformity function, converts a heuristic heatmap detection into a prediction set that provably covers the true keypoint location with a user-specified probability (e.g., 90%). We design three different nonconformity functions leading to circular or elliptical prediction sets that are easy to compute. On the LINEMOD Occluded dataset we demonstrate that (i) the empirical coverage rate of the prediction sets is valid; (ii) the prediction sets are tight, e.g., a ball with radius 10 pixels covers true keypoint locations on most test images; and (iii) the prediction sets are adaptive, i.e., their sizes become larger for keypoints that are difficult to detect and smaller for easy instances.