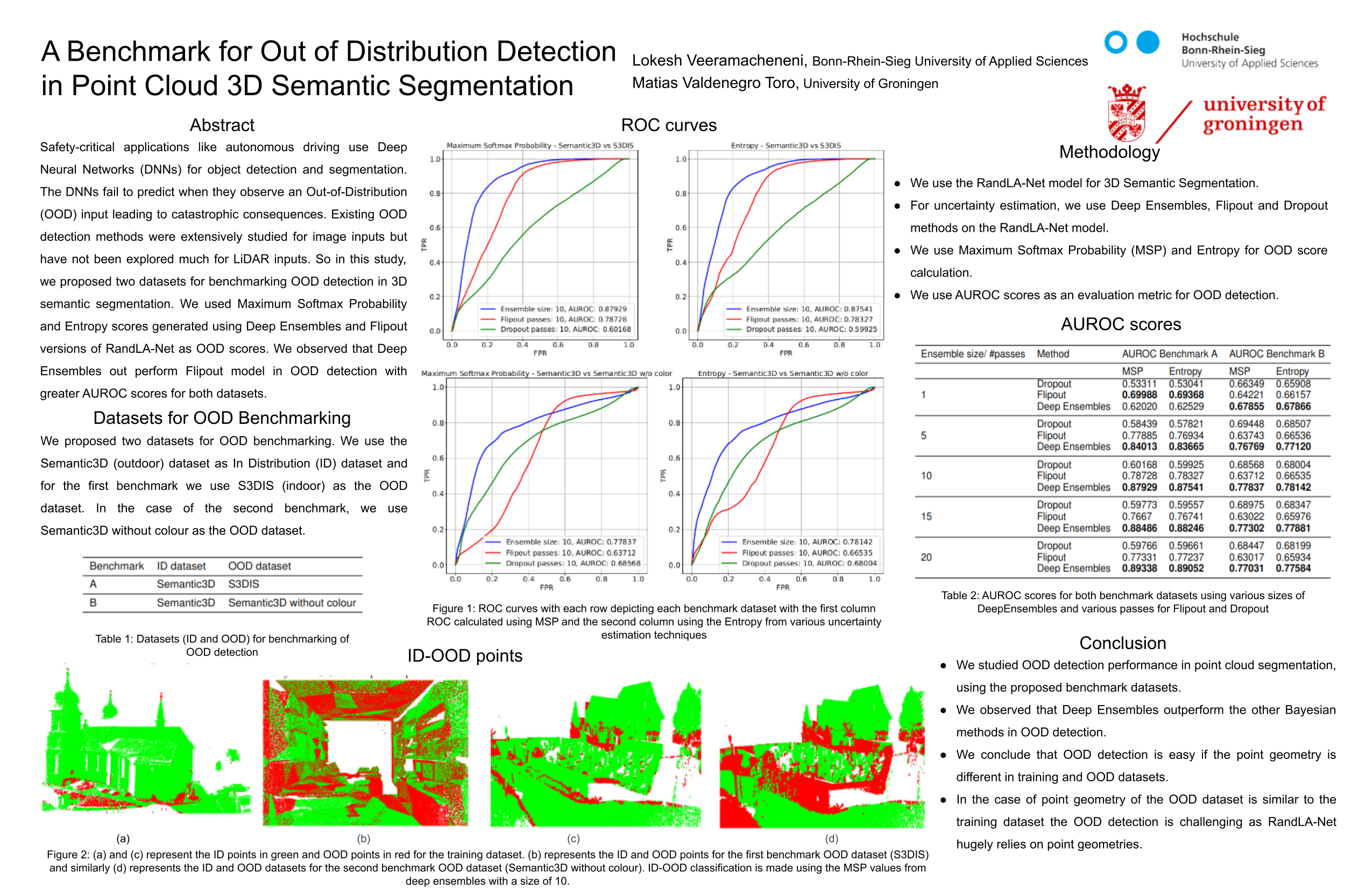
A Benchmark for Out of Distribution Detection in Point Cloud 3D Semantic Segmentation
Lokesh Veeramacheneni ⋅ Matias Valdenegro-Toro
{kind=link}
Abstract
Safety-critical applications like autonomous driving use Deep Neural Networks (DNNs) for object detection and segmentation. The DNNs fail to predict when theyobserve an Out-of-Distribution (OOD) input leading to catastrophic consequences.Existing OOD detection methods were extensively studied for image inputs but have not been explored much for LiDAR inputs. So in this study, we proposed two datasets for benchmarking OOD detection in 3D semantic segmentation. We used Maximum Softmax Probability and Entropy scores generated using Deep Ensembles and Flipout versions of RandLA-Net as OOD scores. We observed that Deep Ensembles out perform Flipout model in OOD detection with greater AUROC scores for both datasets.
Video
Chat is not available.
Successful Page Load