Robust Forecasting for Robotic Control: A Game-Theoretic Approach
{kind=link}
Abstract
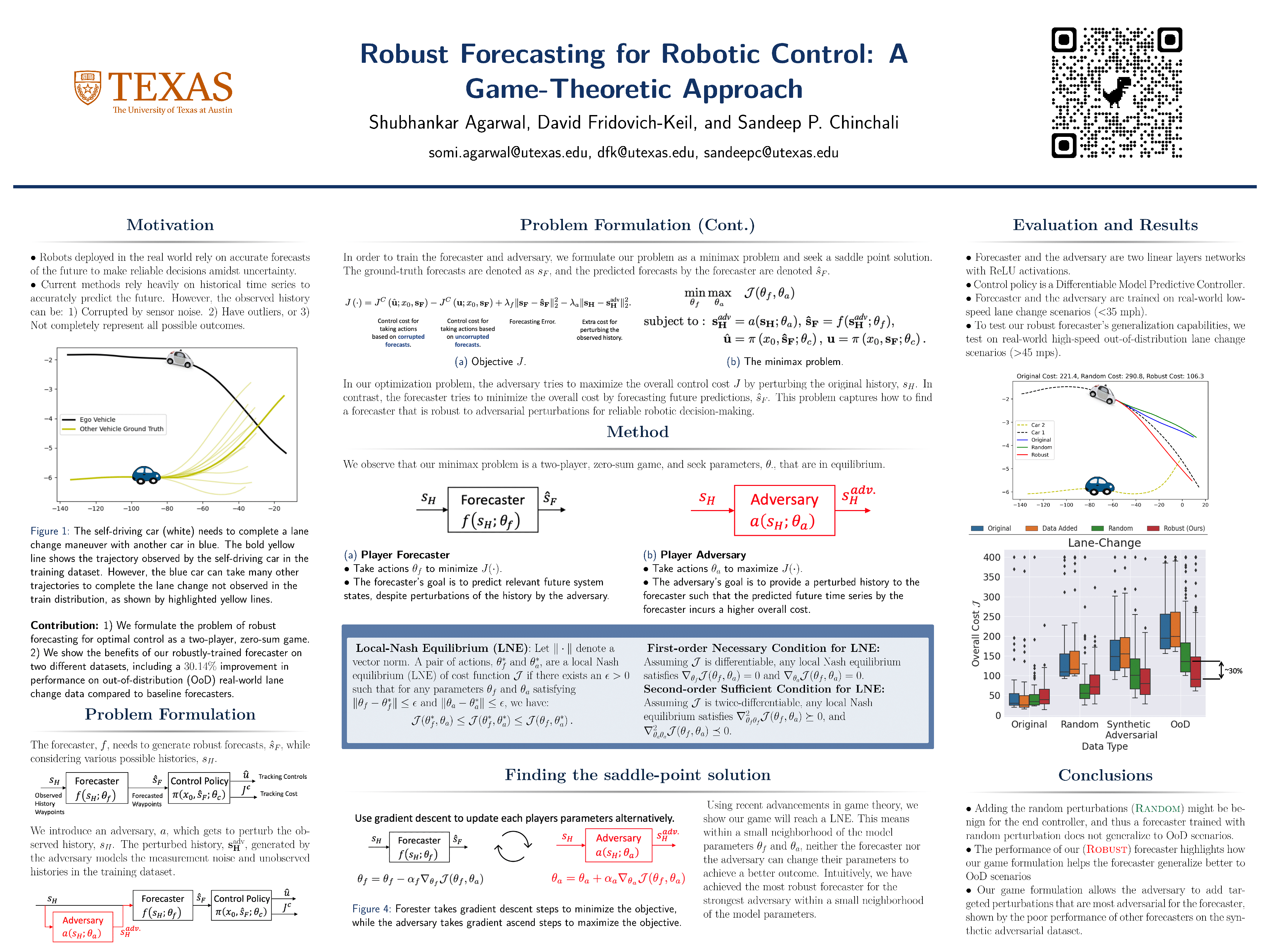
Modern robots require accurate forecasts to make optimal decisions in the real world. For example, self-driving cars need an accurate forecast of other agents' future actions to plan safe trajectories. Current methods rely heavily on historical time series to accurately predict the future. However, relying entirely on the observed history is problematic since it could be corrupted by noise, have outliers, or not completely represent all possible outcomes. We propose a novel framework for generating robust forecasts for robotic control to solve this problem. To model real-world factors affecting future forecasts, we introduce the notion of an adversary, which perturbs observed historical time series to increase a robot's ultimate control cost. Specifically, we model this interaction as a zero-sum two-player game between a robot's forecaster and this hypothetical adversary. We show that our proposed game may be solved to a local Nash equilibrium using gradient-based optimization techniques. Furthermore, a forecaster trained with our method performs 30.14% better on out-of-distribution real-world lane change data than baselines.