Choreographer: Learning and Adapting Skills in Imagination
Pietro Mazzaglia ⋅ Tim Verbelen ⋅ Bart Dhoedt ⋅ Alexandre Lacoste ⋅ Sai Rajeswar Mudumba
{kind=link}
Abstract
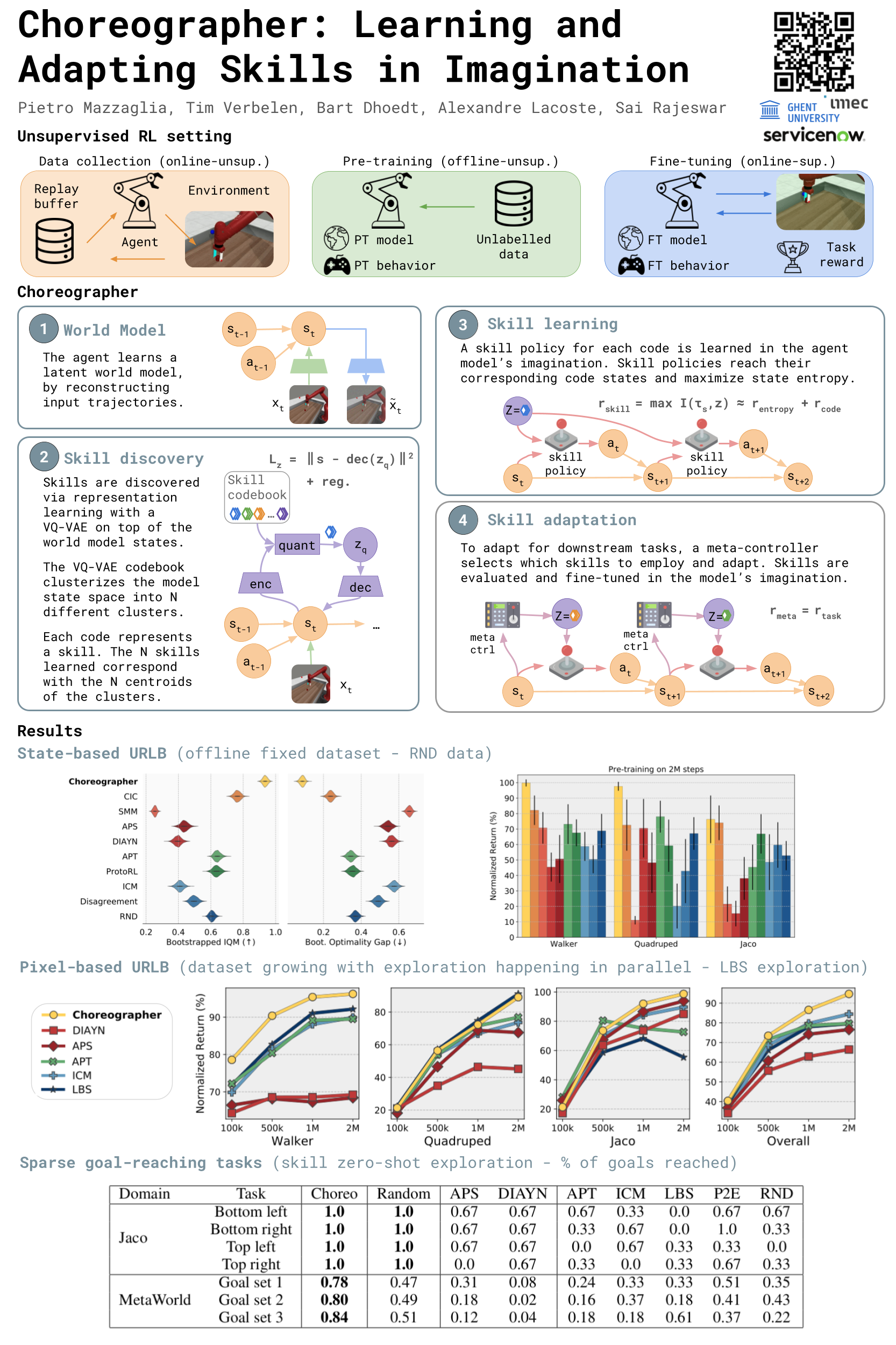
We present Choreographer, a model-based agent that exploits its world model to learn and adapt skills in imagination. Choreographer is able to learn skills from offline unlabeled data and leverage them for effectively adapting to downstream tasks and for exploring the environment thoroughly, to find sparse rewards. Our method decouples the exploration and skill learning processes, being able to discover skills in the latent state space of the model. For adapting to downstream tasks, the agent uses a meta-controller to evaluate and adapt the learned skills efficiently by deploying them in parallel in imagination. Project website: https://doubleblind-repos.github.io/
Video
Chat is not available.
Successful Page Load