Optimal Transport for Offline Imitation Learning
{kind=link}
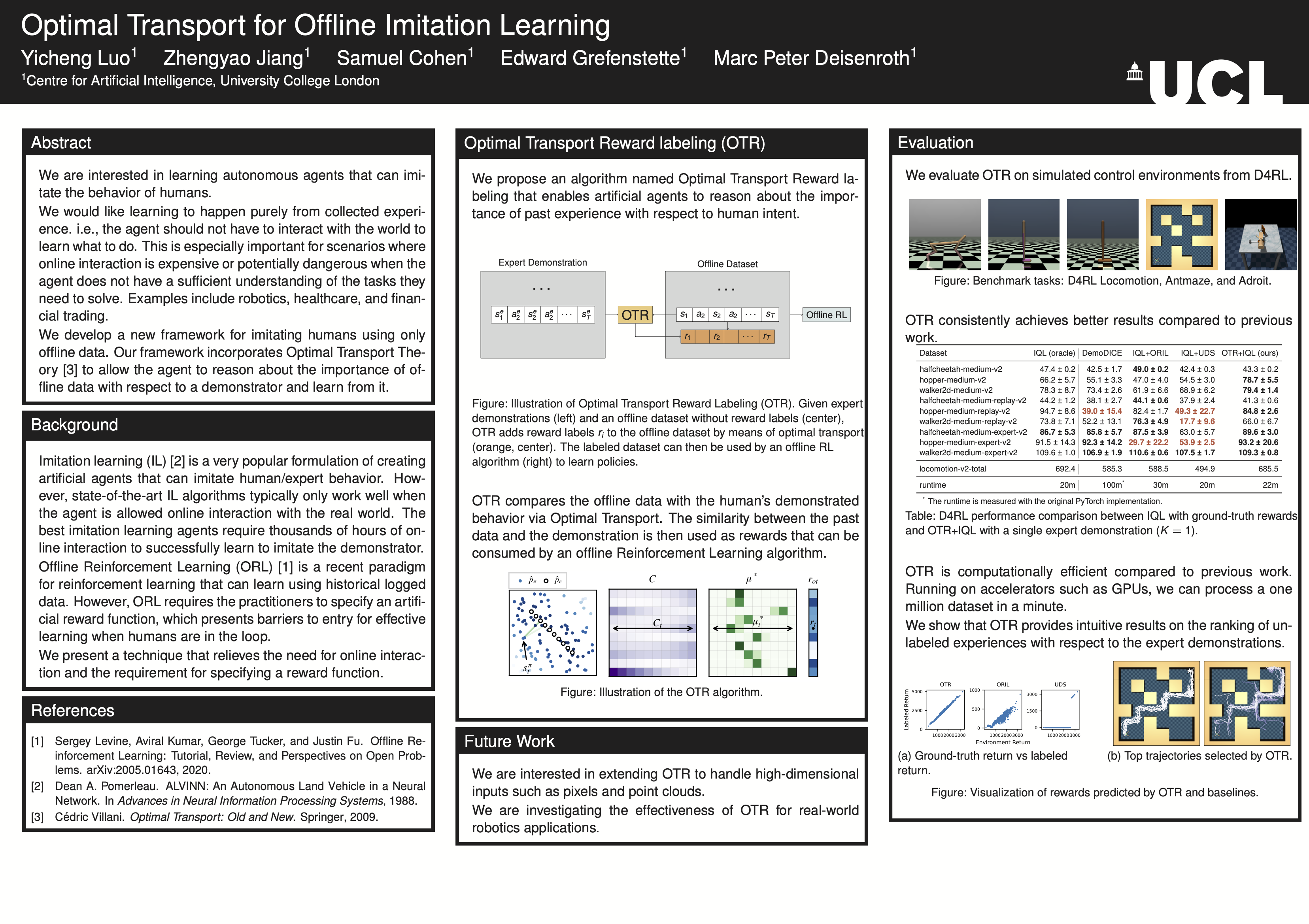
Abstract
With the advent of large datasets, offline reinforcement learning is a promising framework for learning good decision-making policies without the need to interact with the real environment.However, offline RL requires the dataset to be reward-annotated, which presents practical challenges when reward engineering is difficult or when obtaining reward annotations is labor-intensive.In this paper, we introduce Optimal Transport Reward labeling (OTR), an algorithm that can assign rewards to offline trajectories, with a few high-quality demonstrations. OTR's key idea is to use optimal transport to compute an optimal alignment between an unlabeled trajectory in the dataset and an expert demonstration to obtain a similarity measure that can be interpreted as a reward, which can then be used by an offline RL algorithm to learn the policy. OTR is easy to implement and computationally efficient. On D4RL benchmarks, we show that OTR with a single demonstration can consistently match the performance of offline RL with ground-truth rewards.