Toward Effective Deep Reinforcement Learning for 3D Robotic Manipulation: End-to-End Learning from Multimodal Raw Sensory Data
{kind=link}
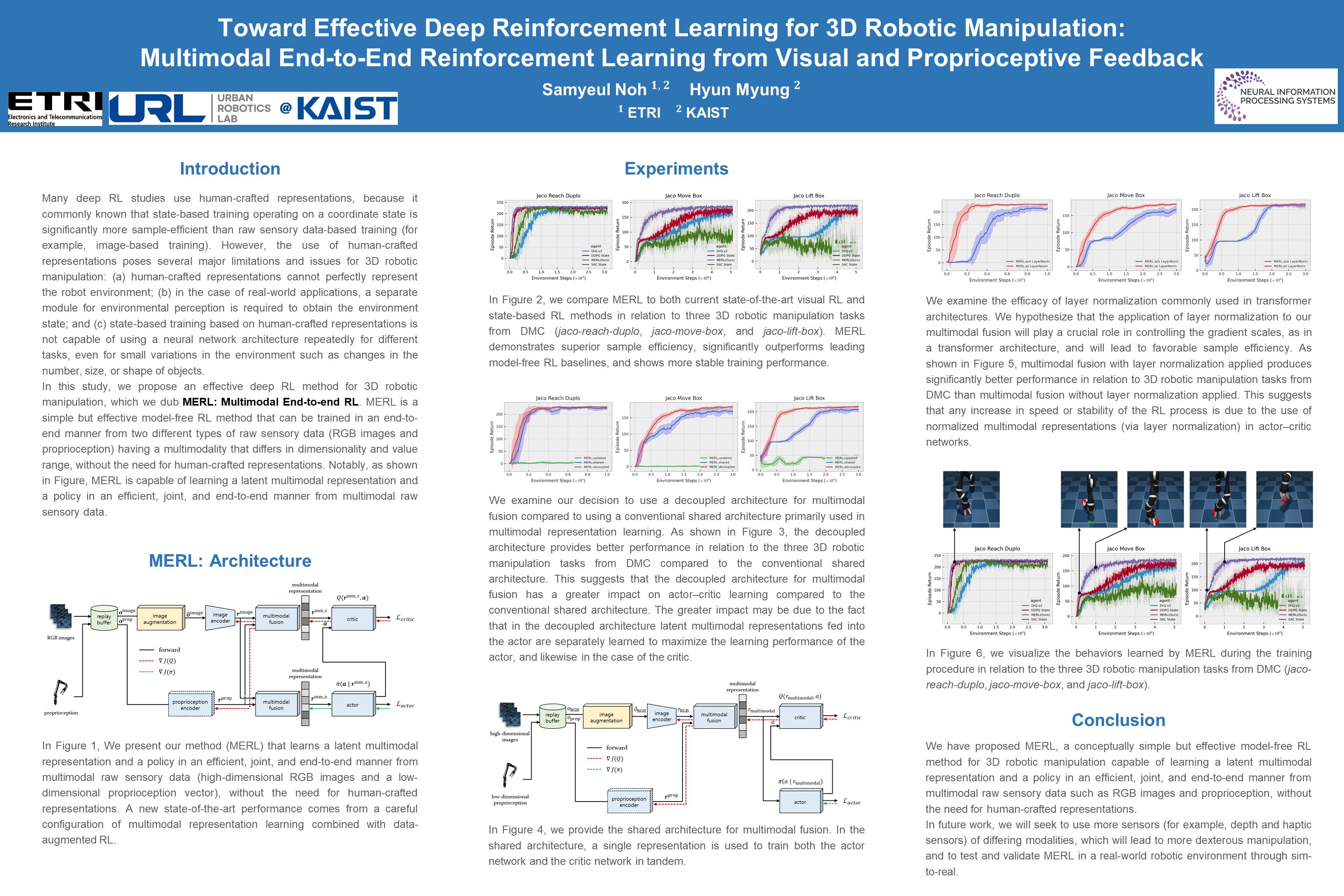
Abstract
Sample-efficient reinforcement learning (RL) methods capable of learning directly from raw sensory data without the use of human-crafted representations would open up real-world applications in robotics and control. Recent advances in visual RL have shown that learning a latent representation together with existing RL algorithms closes the gap between state-based and image-based training. However, image-based training is still significantly sample-inefficient with respect to learning in 3D continuous control problems (for example, robotic manipulation) compared to state-based training. In this study, we propose an effective model-free off-policy RL method for 3D robotic manipulation that can be trained in an end-to-end manner from multimodal raw sensory data obtained from a vision camera and a robot's joint encoders, without the need for human-crafted representations. Notably, our method is capable of learning a latent multimodal representation and a policy in an efficient, joint, and end-to-end manner from multimodal raw sensory data. Our method, which we dub MERL: Multimodal End-to-end Reinforcement Learning, results in a simple but effective approach capable of significantly outperforming both current state-of-the-art visual RL and state-based RL methods with respect to sample efficiency, learning performance, and training stability in relation to 3D robotic manipulation tasks from DeepMind Control.