Guided Skill Learning and Abstraction for Long-Horizon Manipulation
{kind=link}
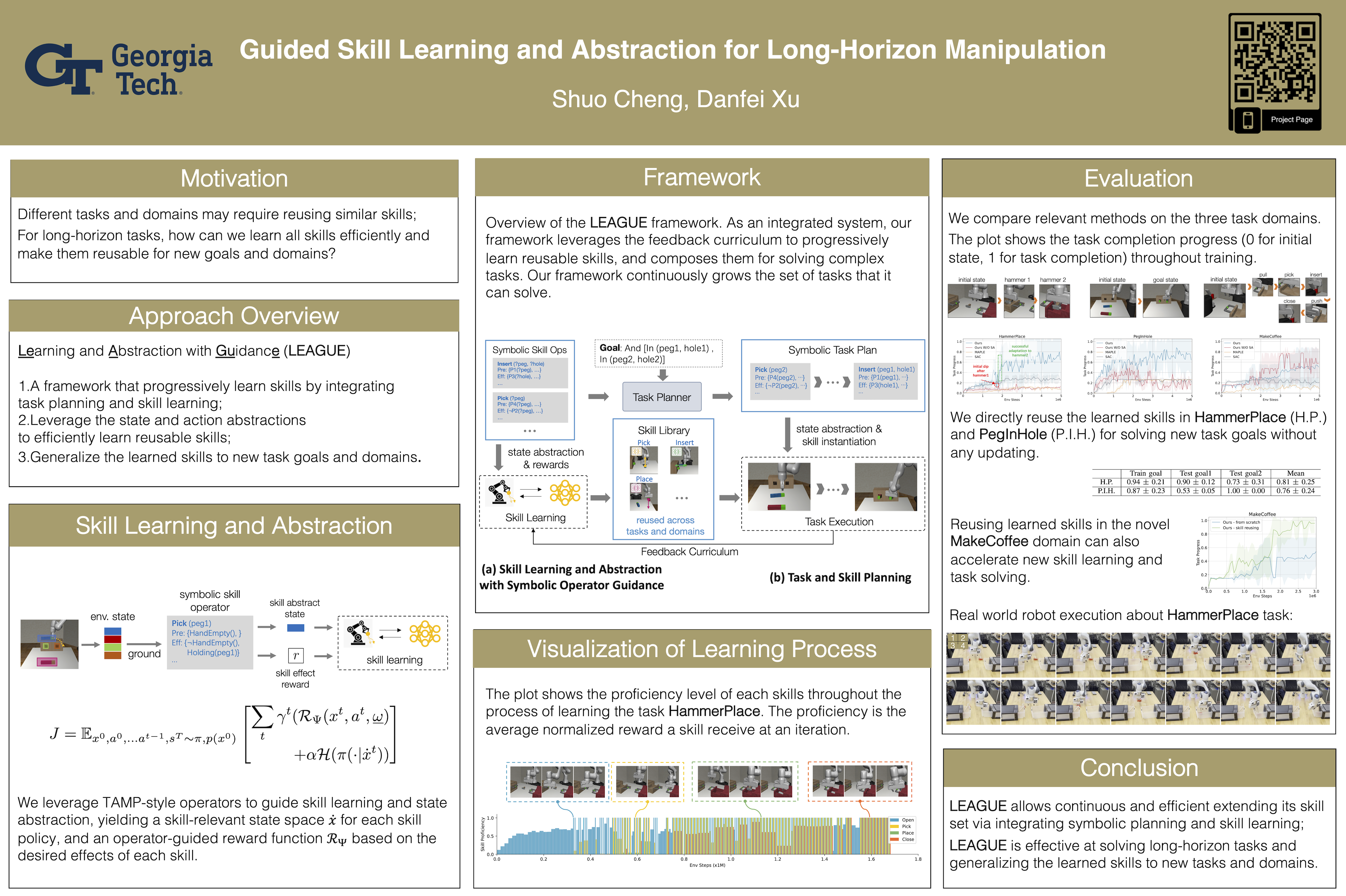
Abstract
To assist with everyday human activities, robots must solve complex long-horizon tasks and generalize to new settings. Recent deep reinforcement learning (RL) methods show promises in fully autonomous learning, but they struggle to reach long-term goals in large environments. On the other hand, Task and Motion Planning (TAMP) approaches excel at solving and generalizing across long-horizon tasks, thanks to their powerful state and action abstractions. But they assume predefined skill sets, which limits their real-world applications. In this work, we combine the benefits of these two paradigms and propose an integrated task planning and skill learning framework named LEAGUE (Learning and Abstraction with Guidance). LEAGUE leverages symbolic interface of a task planner to guide RL-based skill learning and creates abstract state space to enable skill reuse. More importantly, LEAGUE learns manipulation skills in-situ of the task planning system, continuously growing its capability and the set of tasks that it can solve. We demonstrate LEAGUE on three challenging simulated task domains and show that LEAGUE outperforms baselines by a large margin, and that the learned skills can be reused to accelerate learning in new tasks and domains. Additional resource is available at https://bit.ly/3eUOx4N.