Efficient Preference-Based Reinforcement Learning Using Learned Dynamics Models
{kind=link}
Abstract
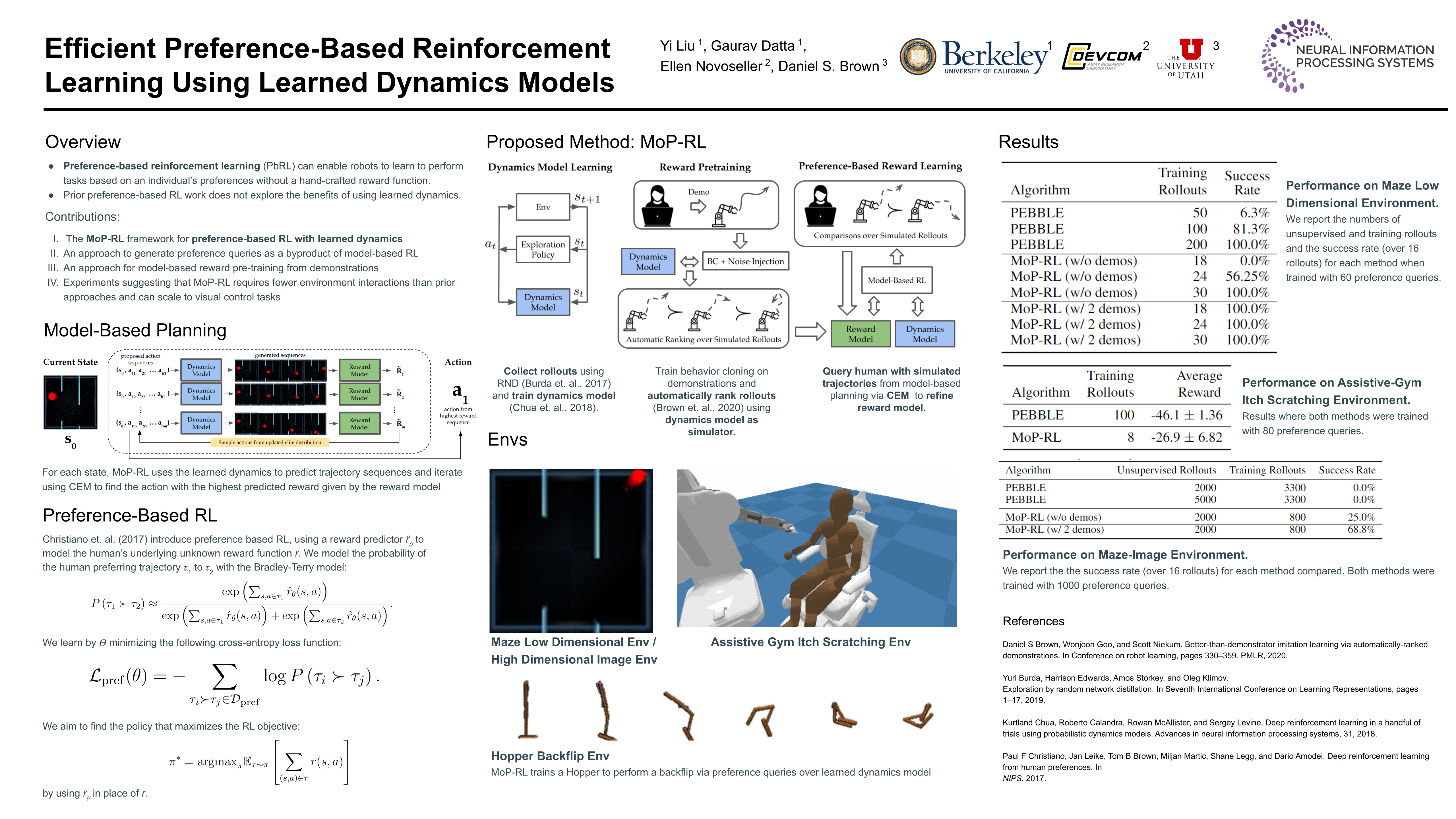
Preference-based reinforcement learning (PbRL) can enable robots to learn to perform tasks based on an individual's preferences without requiring a hand-crafted reward function. However, existing approaches either assume access to a high-fidelity simulator or analytic model or take a model-free approach that requires extensive, possibly unsafe online environment interactions. In this paper, we study the benefits and challenges of using a learned dynamics model when performing PbRL. In particular, we provide evidence that a learned dynamics model offers the following benefits when performing PbRL: (1) preference elicitation and policy optimization require significantly fewer environment interactions than model-free PbRL, (2) diverse preference queries can be synthesized safely and efficiently as a byproduct of standard model-based RL, and (3) reward pretraining based on suboptimal demonstrations can be performed without any environmental interaction. Our paper provides empirical evidence that learned dynamics models enable robots to learn customized policies based on user preferences in ways that are safer and more sample efficient than prior preference learning approaches.