Interactive Concept Bottleneck Models
{kind=link}
Abstract
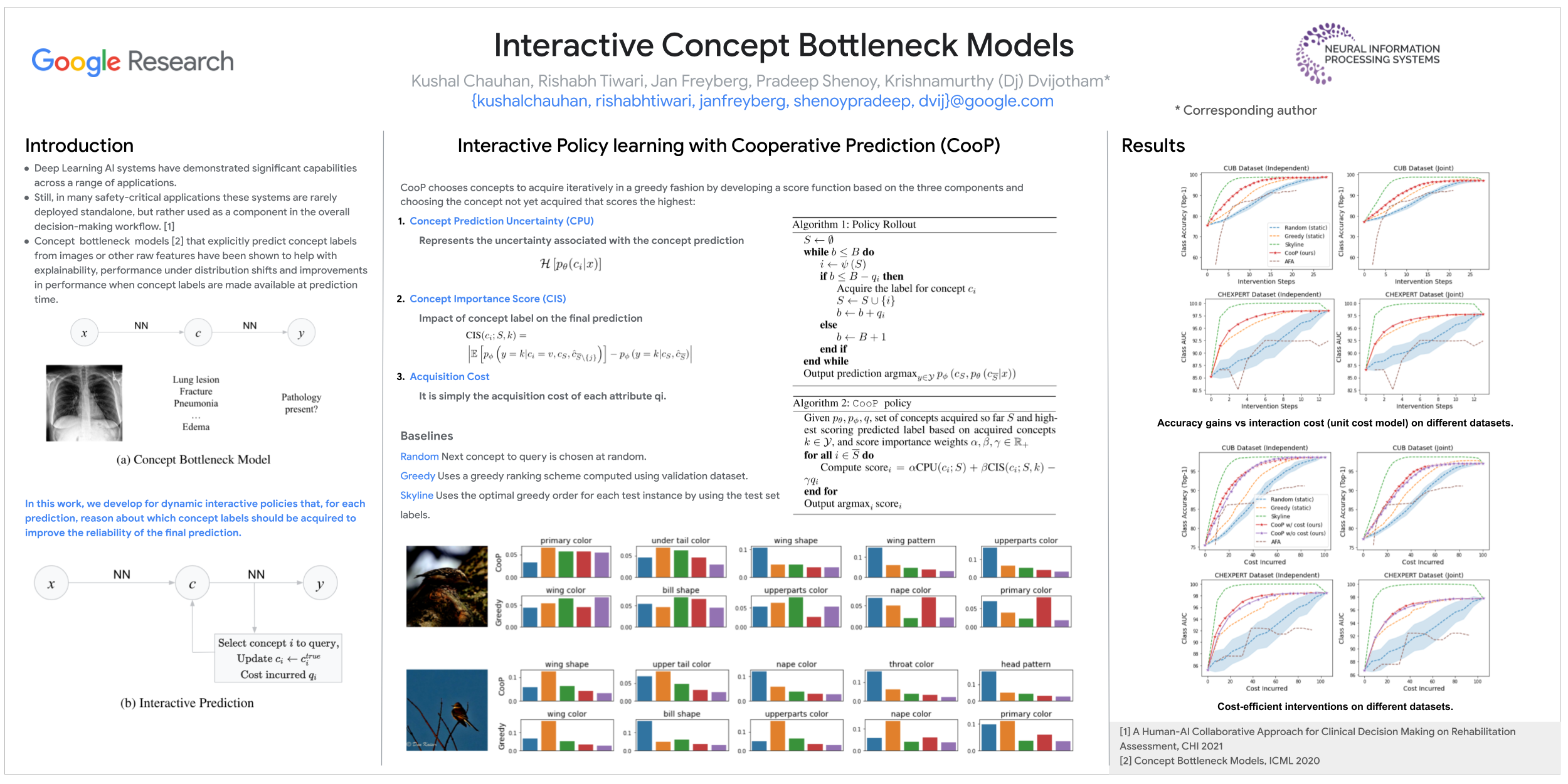
Concept bottleneck models (CBMs) are interpretable neural networks that first predict labels for human-interpretable concepts relevant to the prediction task, and then predict the final label based on the concept label predictions. We extend CBMs to interactive prediction settings where the model can query a human collaborator for the label to some concepts. We develop an interaction policy that, at prediction time, chooses which concepts to request a label for so as to maximally improve the final prediction. We demonstrate that a simple policy combining concept prediction uncertainty and influence of the concept on the final prediction achieves strong performance and outperforms a static approach proposed in as well as active feature acquisition methods proposed in the literature. We show that the interactive CBM can achieve accuracy gains of 5-10\% with only 5 interactions over competitive baselines on the Caltech UCSB Birds dataset and the Chexpert dataset.