Learning Topological Representation of Sensor Network with Persistent Homology in HCI Systems
{kind=link}
Abstract
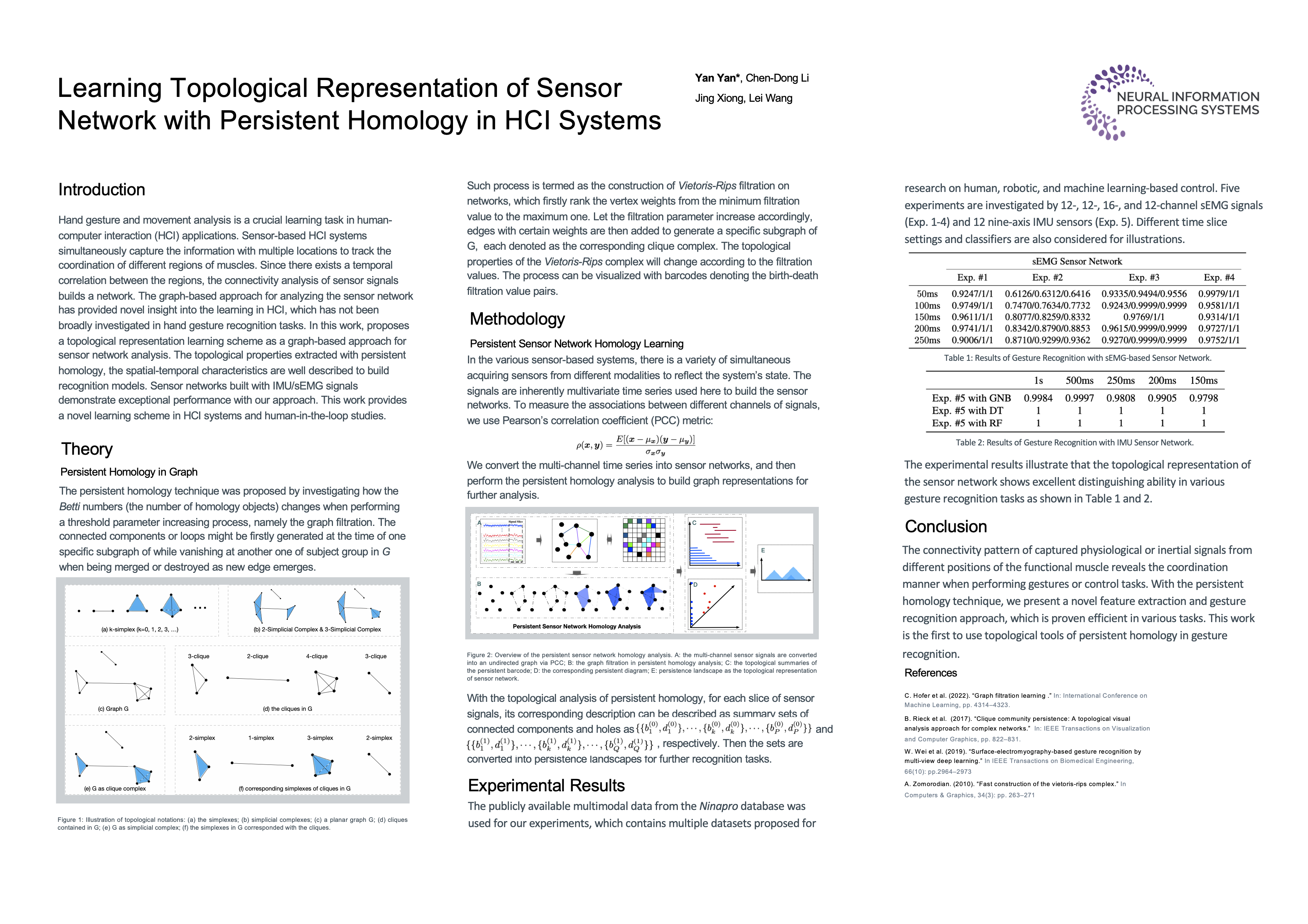
Hand gesture and movement analysis is a crucial learning task in Human-computer interaction (HCI) applications. Sensor-based HCI systems simultaneously capture the information with multiple locations to track the coordination of different regions of muscles. Based on the fact that there exists a temporal correlation between the regions, the connectivity analysis of sensor signals builds a network. The graph-based approach for analyzing the sensor network has provided novel insight into the learning in HCI, which has not been broadly investigated in hand gesture recognition tasks. This work proposes a topological representation learning scheme as a graph-based approach for sensor network analysis. Through investigation of the topological properties with persistent homology, the spatial-temporal characteristics are well described to build recognition models. Experiments on the NinaPro DB-2, DB-4, DB-5, and DB-7 datasets with sensor networks built with sEMG signal and IMU signal demonstrate exceptional performance of the proposed topological approach. The topological features are effective in graph representation learning with sensor networks used in hand gesture recognition tasks. The proposed work provides a novel learning scheme in HCI systems and human-in-the-loop studies.