A Study of Human-Robot Handover through Human-Human Object Transfer
Charlotte Morissette ⋅ Bobak Baghi ⋅ Francois Hogan ⋅ Gregory Dudek
{kind=link}
Abstract
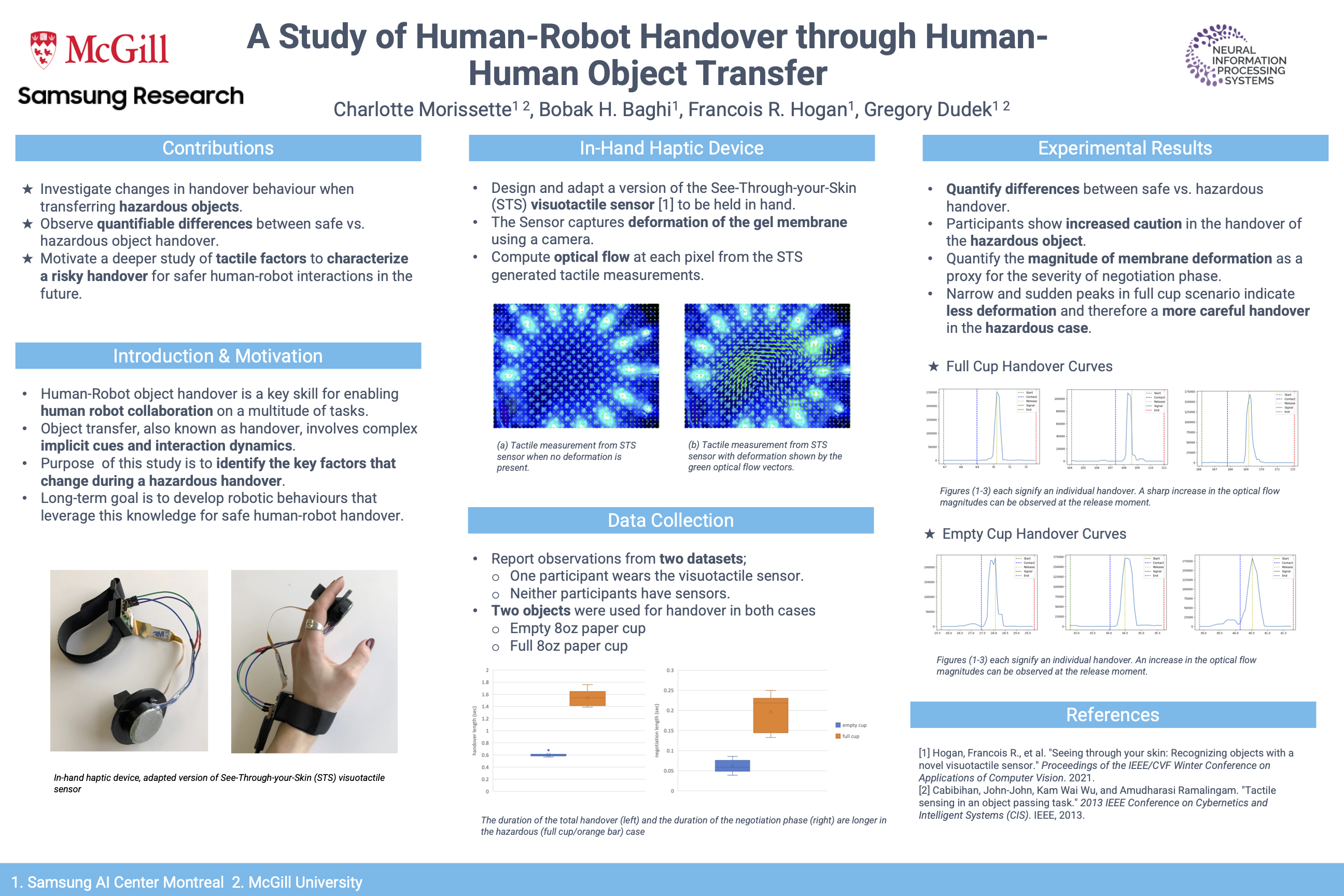
In this preliminary study, we investigate changes in handover behaviour when transferring hazardous objects with the help of the see-through-your-skin (STS), visuotactile sensor. Participants were asked to hand over a safe and hazardous object (a full cup and an empty cup) while instrumented with a modified STS sensor. Our data shows a clear difference in the length of handover for the full cup vs the empty one, with the former being slower. Sensor data further supports a change in handover behaviour dependent on object risk. The results of this paper motivate a deeper study of tactile factors which could characterize a risky handover allowing for safer human-robot interactions in the future.
Chat is not available.
Successful Page Load