Certified data-driven physics-informed greedy auto-encoder simulator
{kind=link}
Abstract
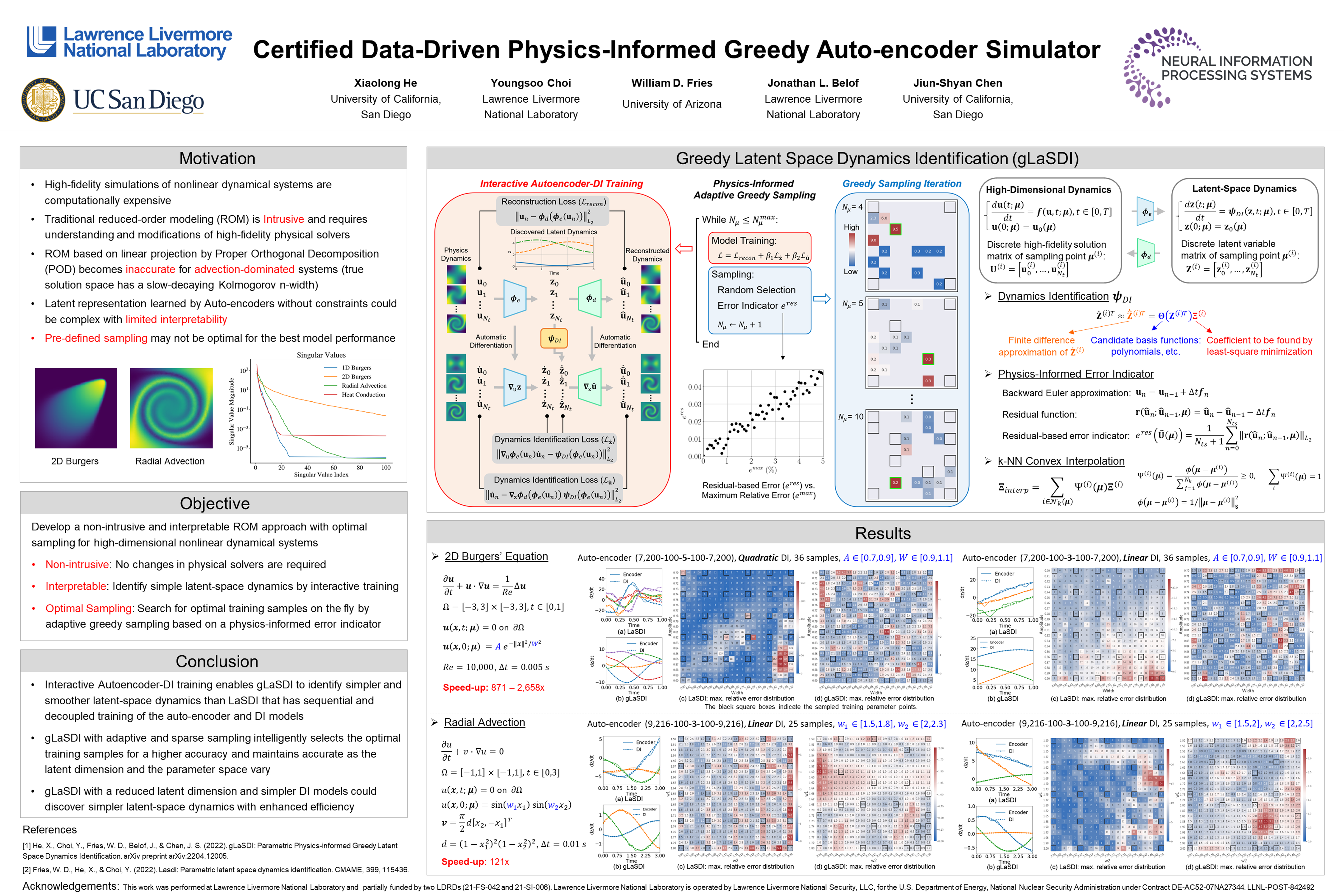
A parametric adaptive greedy Latent Space Dynamics Identification (gLaSDI) framework is developed for accurate, efficient, and certified data-driven physics-informed greedy auto-encoder simulators of high-dimensional nonlinear dynamical systems. In the proposed framework, an auto-encoder and dynamics identification models are trained interactively to discover intrinsic and simple latent-space dynamics. To effectively explore the parameter space for optimal model performance, an adaptive greedy sampling algorithm integrated with a physics-informed error indicator is introduced to search for optimal training samples on the fly, outperforming the conventional predefined uniform sampling. Further, an efficient k-nearest neighbor convex interpolation scheme is employed to exploit local latent-space dynamics for improved predictability. Numerical results demonstrate that the proposed method achieves 121 to 2,658x speed-up with 1 to 5% relative errors for radial advection dynamical problems.