Finite Sample Analysis Of Dynamic Regression Parameter Learning
{kind=link}
Abstract
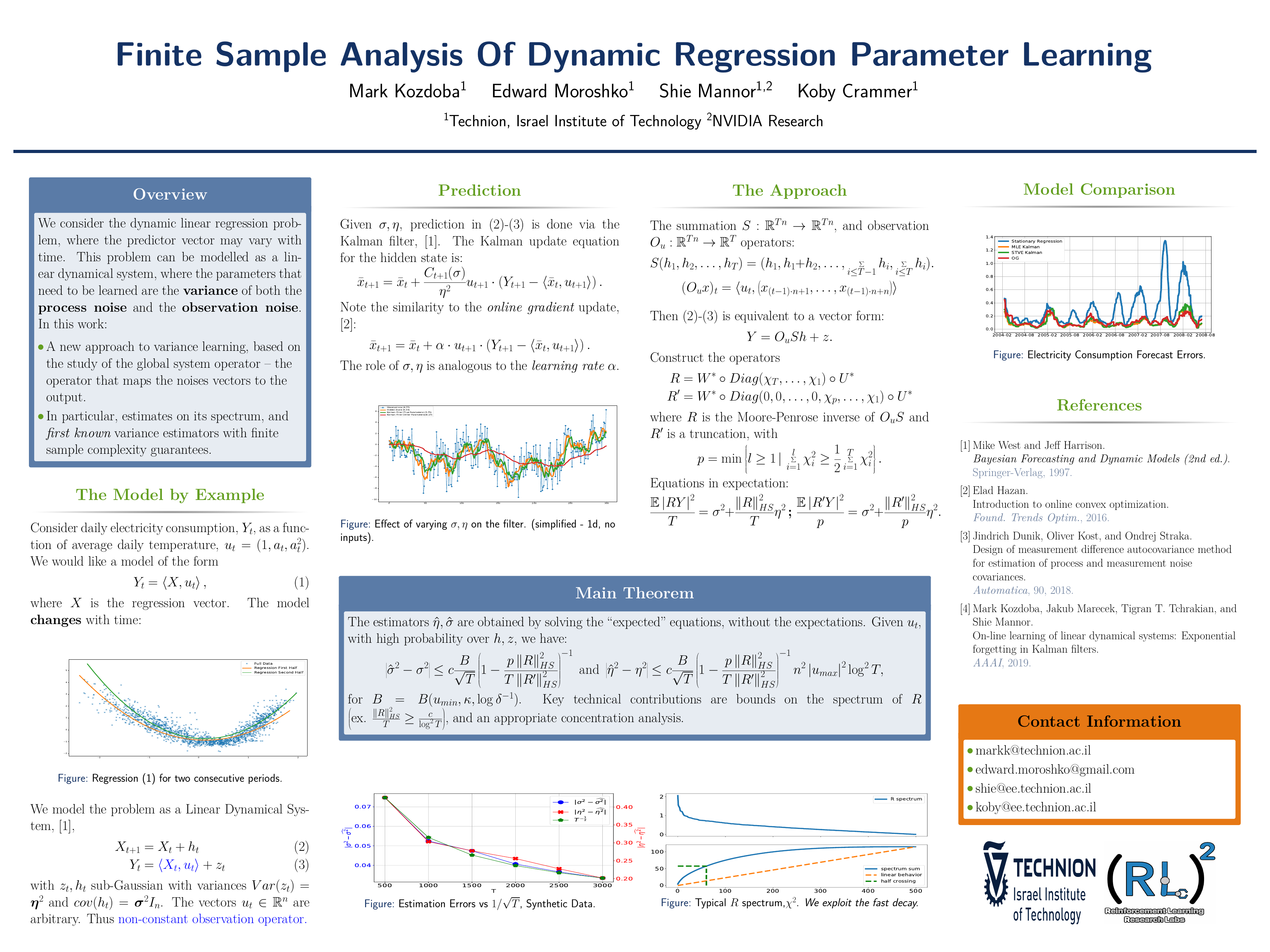
We consider the dynamic linear regression problem, where the predictor vector may vary with time. This problem can be modeled as a linear dynamical system, with non-constant observation operator, where the parameters that need to be learned are the variance of both the process noise and the observation noise. While variance estimation for dynamic regression is a natural problem, with a variety of applications, existing approaches to this problem either lack guarantees altogether, or only have asymptotic guarantees without explicit rates. In particular, existing literature does not provide any clues to the following fundamental question: In terms of data characteristics, what does the convergence rate depend on? In this paper we study the global system operator -- the operator that maps the noise vectors to the output. We obtain estimates on its spectrum, and as a result derive the first known variance estimators with finite sample complexity guarantees. The proposed bounds depend on the shape of a certain spectrum related to the system operator, and thus provide the first known explicit geometric parameter of the data that can be used to bound estimation errors. In addition, the results hold for arbitrary sub Gaussian distributions of noise terms. We evaluate the approach on synthetic and real-world benchmarks.