BYOL-Explore: Exploration by Bootstrapped Prediction
{kind=link}
Abstract
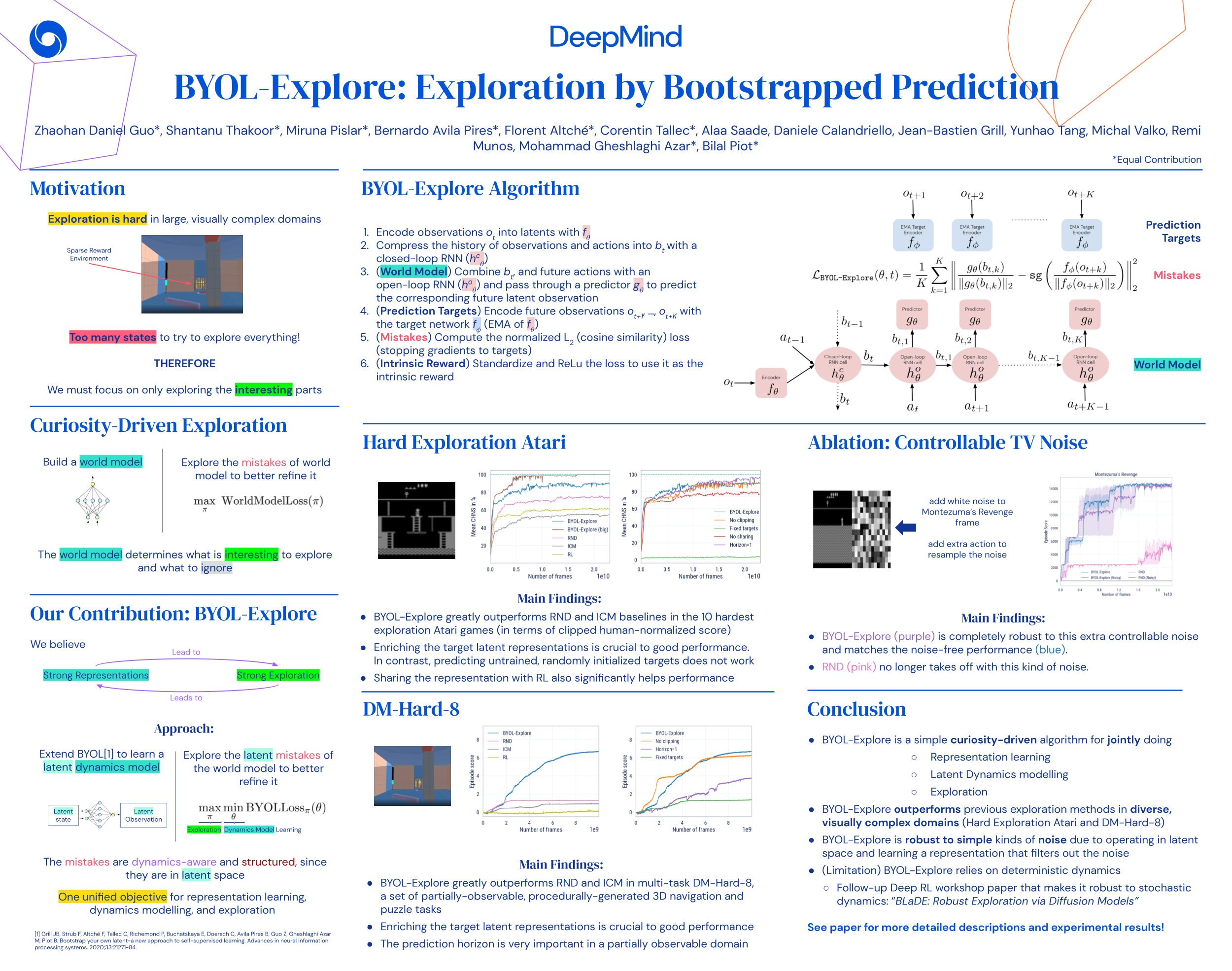
We present BYOL-Explore, a conceptually simple yet general approach for curiosity-driven exploration in visually complex environments. BYOL-Explore learns the world representation, the world dynamics and the exploration policy all-together by optimizing a single prediction loss in the latent space with no additional auxiliary objective. We show that BYOL-Explore is effective in DM-HARD-8, a challenging partially-observable continuous-action hard-exploration benchmark with visually rich 3-D environment. On this benchmark, we solve the majority of the tasks purely through augmenting the extrinsic reward with BYOL-Explore intrinsic reward, whereas prior work could only get off the ground with human demonstrations. As further evidence of the generality of BYOL-Explore, we show that it achieves superhuman performance on the ten hardest exploration games in Atari while having a much simpler design than other competitive agents.