On Analyzing Generative and Denoising Capabilities of Diffusion-based Deep Generative Models
{kind=link}
Abstract
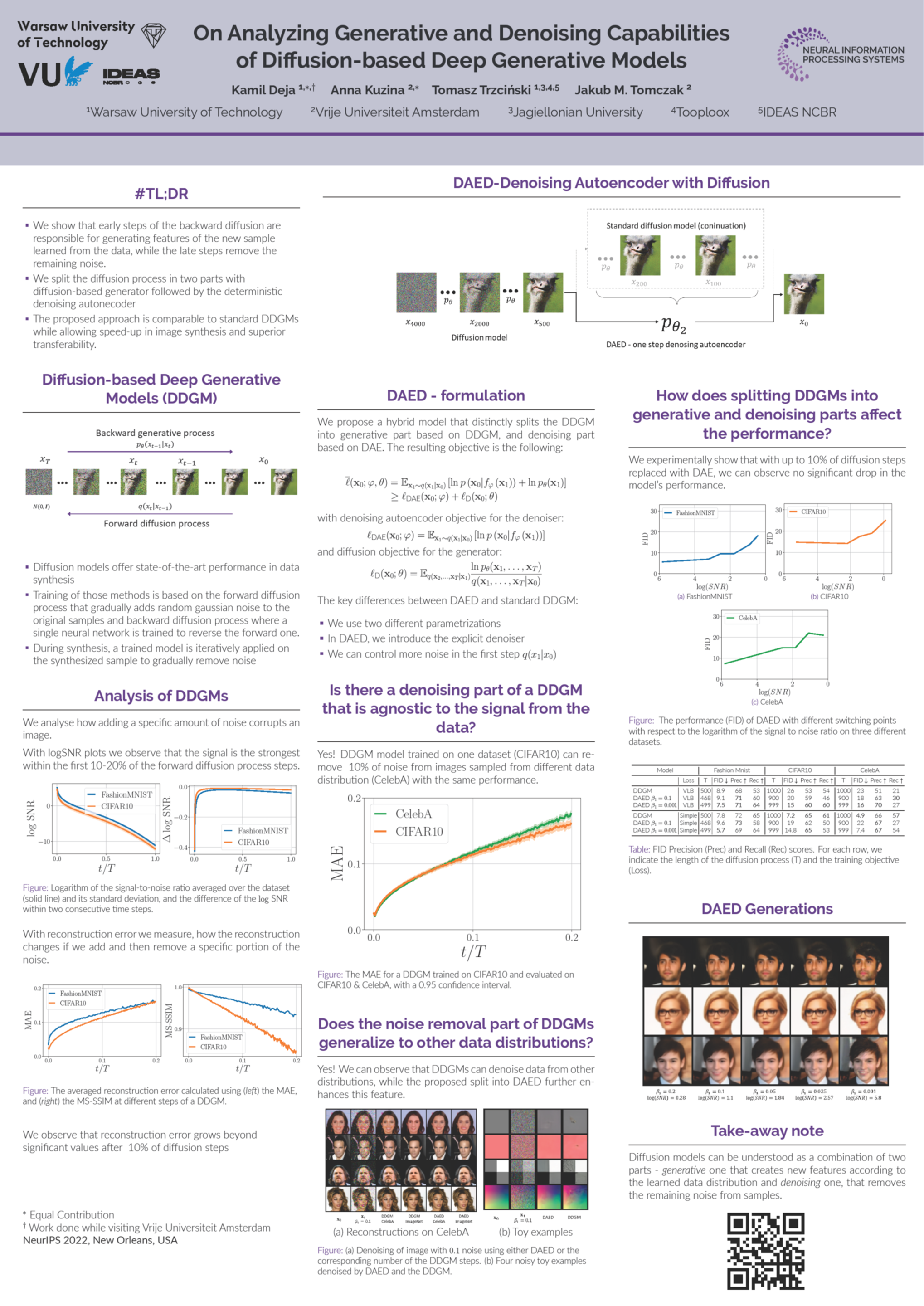
Diffusion-based Deep Generative Models (DDGMs) offer state-of-the-art performance in generative modeling. Their main strength comes from their unique setup in which a model (the backward diffusion process) is trained to reverse the forward diffusion process, which gradually adds noise to the input signal. Although DDGMs are well studied, it is still unclear how the small amount of noise is transformed during the backward diffusion process. Here, we focus on analyzing this problem to gain more insight into the behavior of DDGMs and their denoising and generative capabilities. We observe a fluid transition point that changes the functionality of the backward diffusion process from generating a (corrupted) image from noise to denoising the corrupted image to the final sample. Based on this observation, we postulate to divide a DDGM into two parts: a denoiser and a generator. The denoiser could be parameterized by a denoising auto-encoder, while the generator is a diffusion-based model with its own set of parameters. We experimentally validate our proposition, showing its pros and cons.