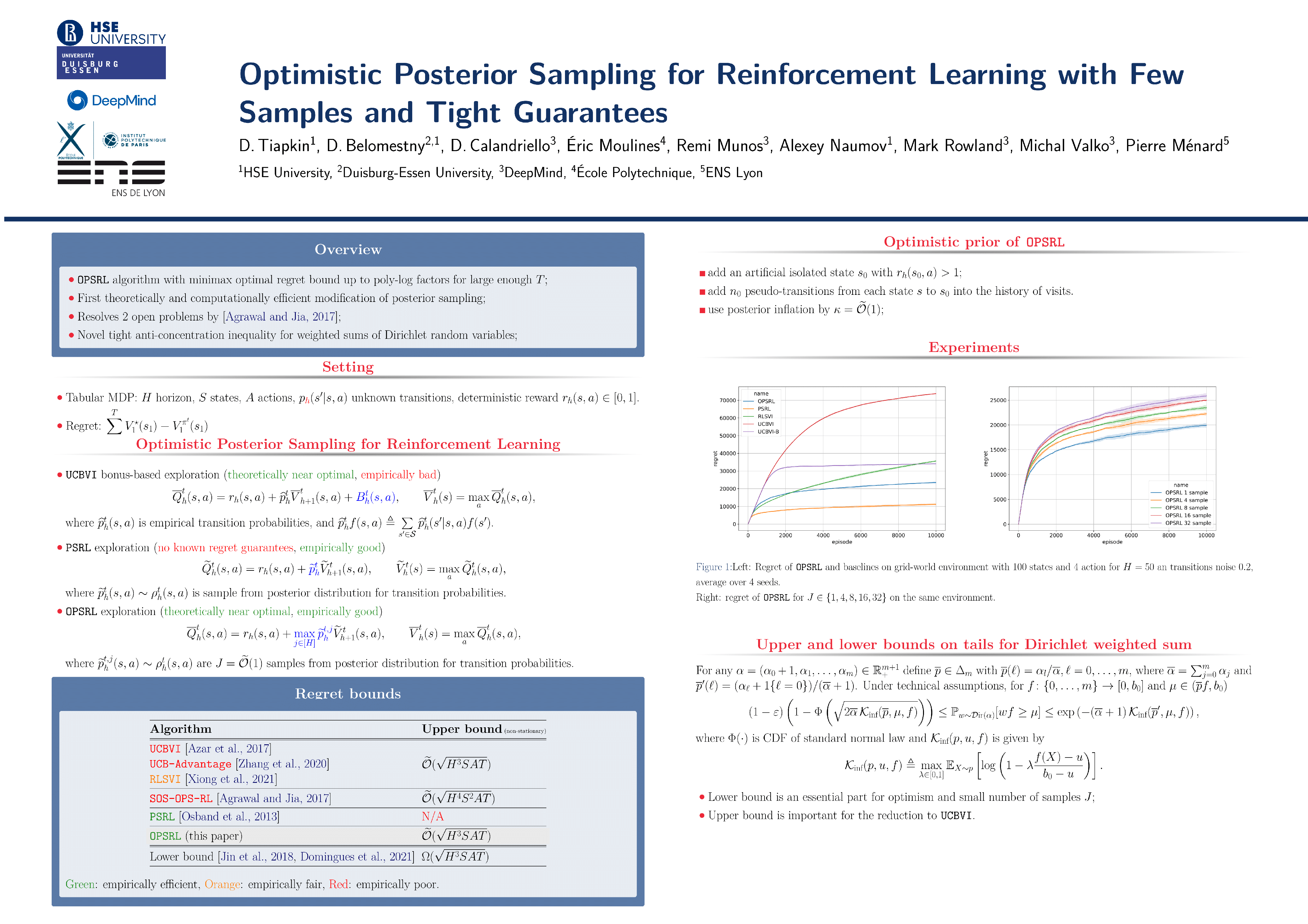
Optimistic Posterior Sampling for Reinforcement Learning with Few Samples and Tight Guarantees
Daniil Tiapkin ⋅ Denis Belomestny ⋅ Daniele Calandriello ⋅ Eric Moulines ⋅ Remi Munos ⋅ Alexey Naumov ⋅ Mark Rowland ⋅ Michal Valko ⋅ Pierre Ménard
2022 Poster
{kind=link}
Abstract
We consider reinforcement learning in an environment modeled by an episodic, tabular, step-dependent Markov decision process of horizon $H$ with $S$ states, and $A$ actions. The performance of an agent is measured by the regret after interacting with the environment for $T$ episodes. We propose an optimistic posterior sampling algorithm for reinforcement learning (OPSRL), a simple variant of posterior sampling that only needs a number of posterior samples logarithmic in $H$, $S$, $A$, and $T$ per state-action pair. For OPSRL we guarantee a high-probability regret bound of order at most $O(\sqrt{H^3SAT})$ ignoring $\text{poly}\log(HSAT)$ terms. The key novel technical ingredient is a new sharp anti-concentration inequality for linear forms of a Dirichlet random vector which may be of independent interest. Specifically, we extend the normal approximation-based lower bound for Beta distributions by Alfers and Dinges (1984) to Dirichlet distributions. Our bound matches the lower bound of order $\Omega(\sqrt{H^3SAT})$, thereby answering the open problems raised by Agrawal and Jia (2017) for the episodic setting.
Video
Chat is not available.
Successful Page Load