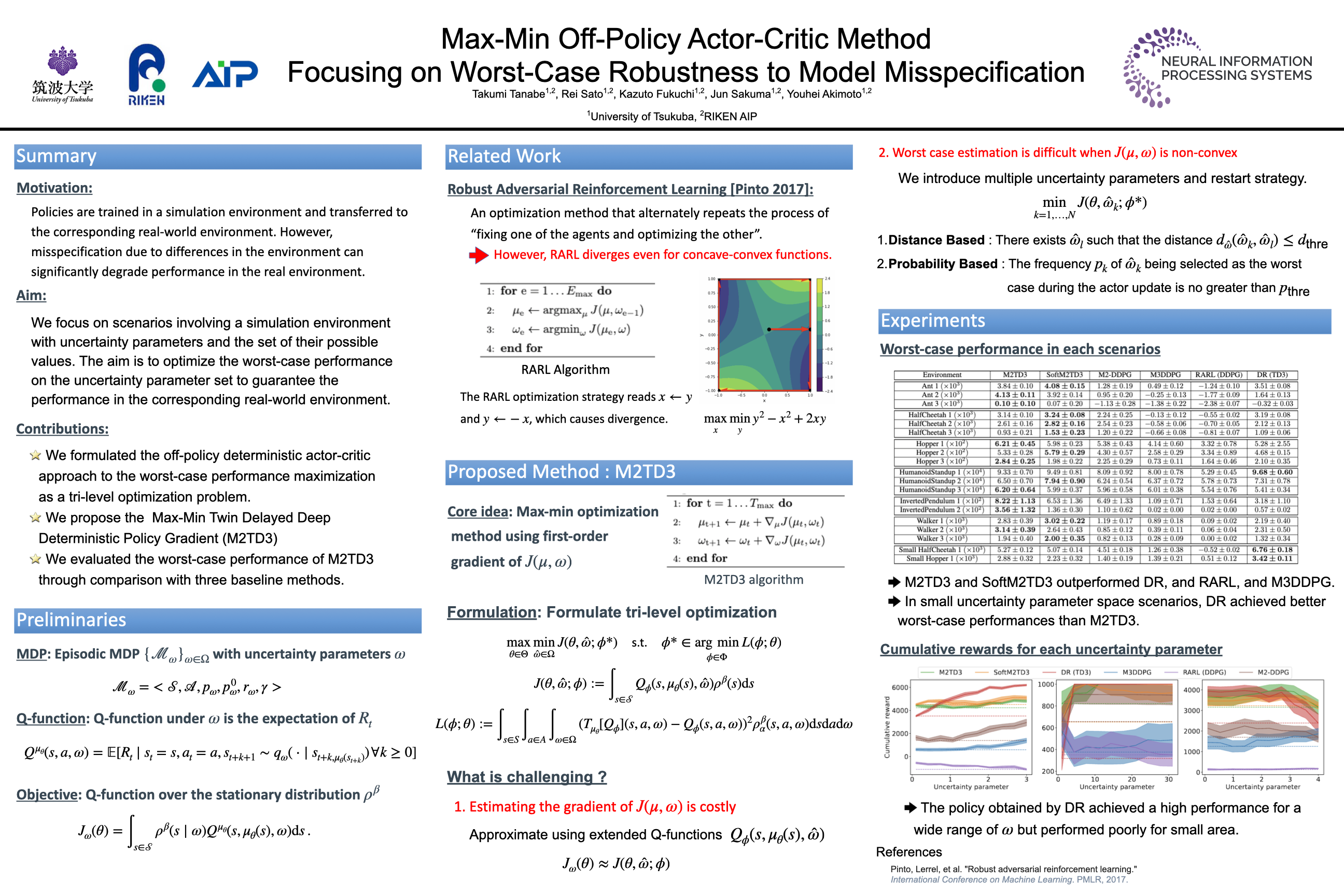
Max-Min Off-Policy Actor-Critic Method Focusing on Worst-Case Robustness to Model Misspecification
{kind=link}
Abstract
In the field of reinforcement learning, because of the high cost and risk of policy training in the real world, policies are trained in a simulation environment and transferred to the corresponding real-world environment.However, the simulation environment does not perfectly mimic the real-world environment, lead to model misspecification. Multiple studies report significant deterioration of policy performance in a real-world environment.In this study, we focus on scenarios involving a simulation environment with uncertainty parameters and the set of their possible values, called the uncertainty parameter set. The aim is to optimize the worst-case performance on the uncertainty parameter set to guarantee the performance in the corresponding real-world environment.To obtain a policy for the optimization, we propose an off-policy actor-critic approach called the Max-Min Twin Delayed Deep Deterministic Policy Gradient algorithm (M2TD3), which solves a max-min optimization problem using a simultaneous gradient ascent descent approach.Experiments in multi-joint dynamics with contact (MuJoCo) environments show that the proposed method exhibited a worst-case performance superior to several baseline approaches.