Nearly Optimal Best-of-Both-Worlds Algorithms for Online Learning with Feedback Graphs
Shinji Ito ⋅ Taira Tsuchiya ⋅ Junya Honda
Keywords:
follow the regularized leader
learning with feedback graphs
best-of-both-worlds algorithm
multi-armed bandit
2022 Poster
{kind=link}
Abstract
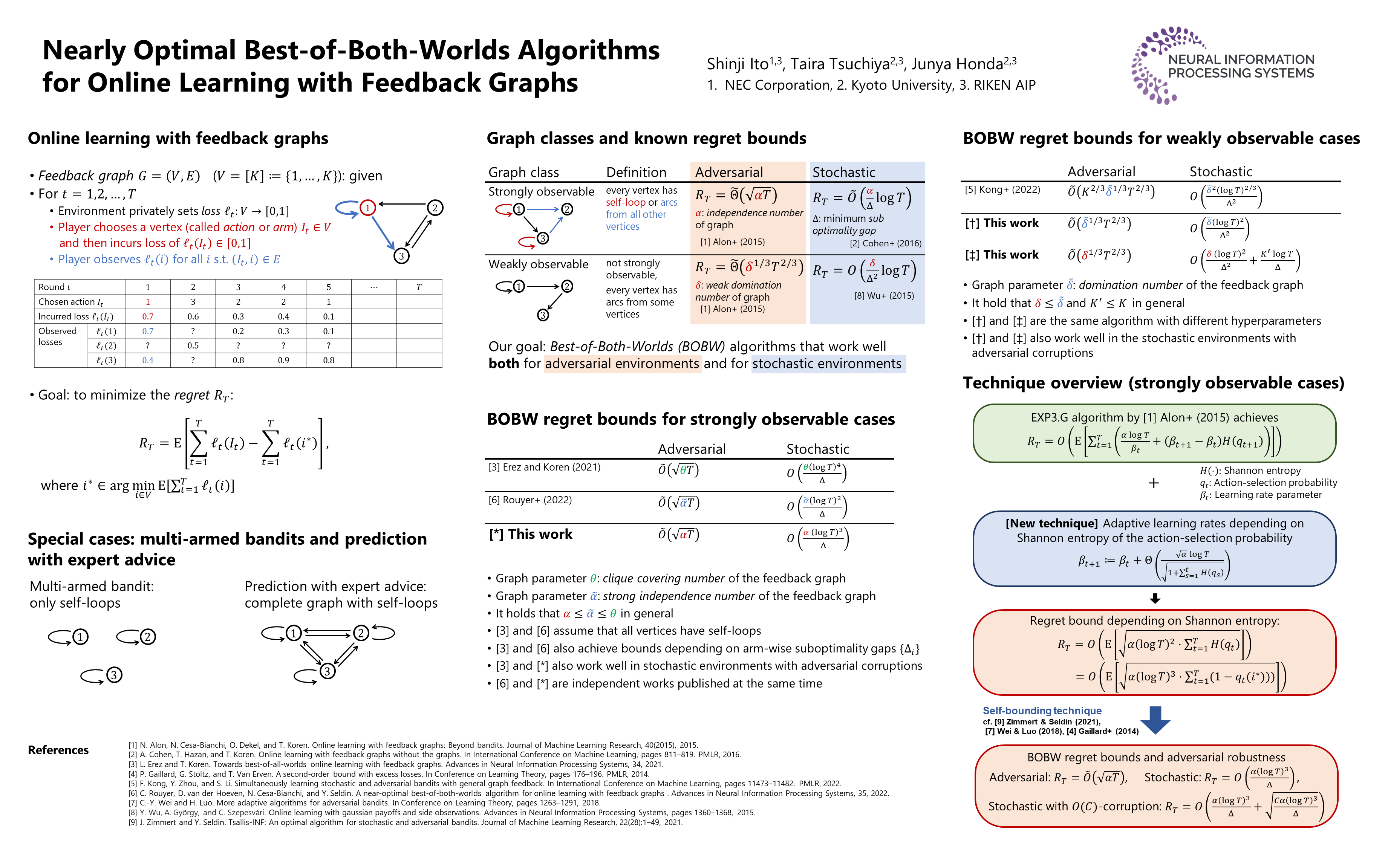
This study considers online learning with general directed feedback graphs. For this problem, we present best-of-both-worlds algorithms that achieve nearly tight regret bounds for adversarial environments as well as poly-logarithmic regret bounds for stochastic environments. As Alon et al. [2015] have shown, tight regret bounds depend on the structure of the feedback graph: strongly observable graphs yield minimax regret of $\tilde{\Theta}( \alpha^{1/2} T^{1/2} )$, while weakly observable graphs induce minimax regret of $\tilde{\Theta}( \delta^{1/3} T^{2/3} )$, where $\alpha$ and $\delta$, respectively, represent the independence number of the graph and the domination number of a certain portion of the graph. Our proposed algorithm for strongly observable graphs has a regret bound of $\tilde{O}( \alpha^{1/2} T^{1/2} )$ for adversarial environments, as well as of $ {O} ( \frac{\alpha (\ln T)^3 }{\Delta_{\min}} ) $ for stochastic environments, where $\Delta_{\min}$ expresses the minimum suboptimality gap. This result resolves an open question raised by Erez and Koren [2021]. We also provide an algorithm for weakly observable graphs that achieves a regret bound of $\tilde{O}( \delta^{1/3}T^{2/3} )$ for adversarial environments and poly-logarithmic regret for stochastic environments. The proposed algorithms are based on the follow-the-regularized-leader approach combined with newly designed update rules for learning rates.
Video
Chat is not available.
Successful Page Load