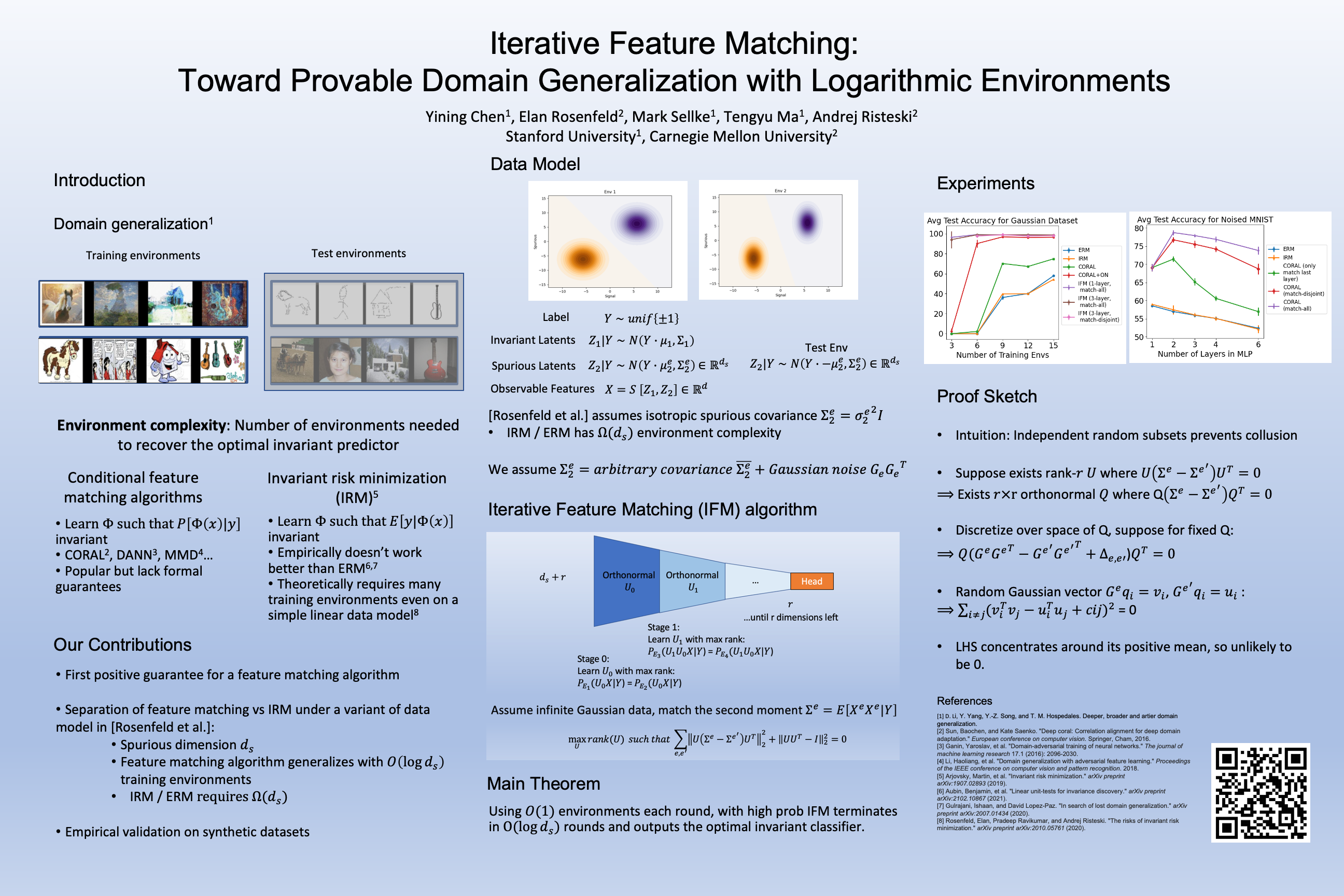
Iterative Feature Matching: Toward Provable Domain Generalization with Logarithmic Environments
Yining Chen ⋅ Elan Rosenfeld ⋅ Mark Sellke ⋅ Tengyu Ma ⋅ Andrej Risteski
Keywords:
domain generalization theory
invariant risk minimization
Domain generalization
out-of-distribution generalization
IRM
Deep Learning Theory
2022 Poster
{kind=link}
Abstract
Domain generalization aims at performing well on unseen test environments with data from a limited number of training environments. Despite a proliferation of proposed algorithms for this task, assessing their performance both theoretically and empirically is still very challenging. Distributional matching algorithms such as (Conditional) Domain Adversarial Networks [Ganin et al., 2016, Long et al., 2018] are popular and enjoy empirical success, but they lack formal guarantees. Other approaches such as Invariant Risk Minimization (IRM) require a prohibitively large number of training environments---linear in the dimension of the spurious feature space $d_s$---even on simple data models like the one proposed by [Rosenfeld et al., 2021]. Under a variant of this model, we show that ERM and IRM can fail to find the optimal invariant predictor with $o(d_s)$ environments. We then present an iterative feature matching algorithm that is guaranteed with high probability to find the optimal invariant predictor after seeing only $O(\log d_s)$ environments. Our results provide the first theoretical justification for distribution-matching algorithms widely used in practice under a concrete nontrivial data model.
Video
Chat is not available.
Successful Page Load