Bayesian Spline Learning for Equation Discovery of Nonlinear Dynamics with Quantified Uncertainty
{kind=link}
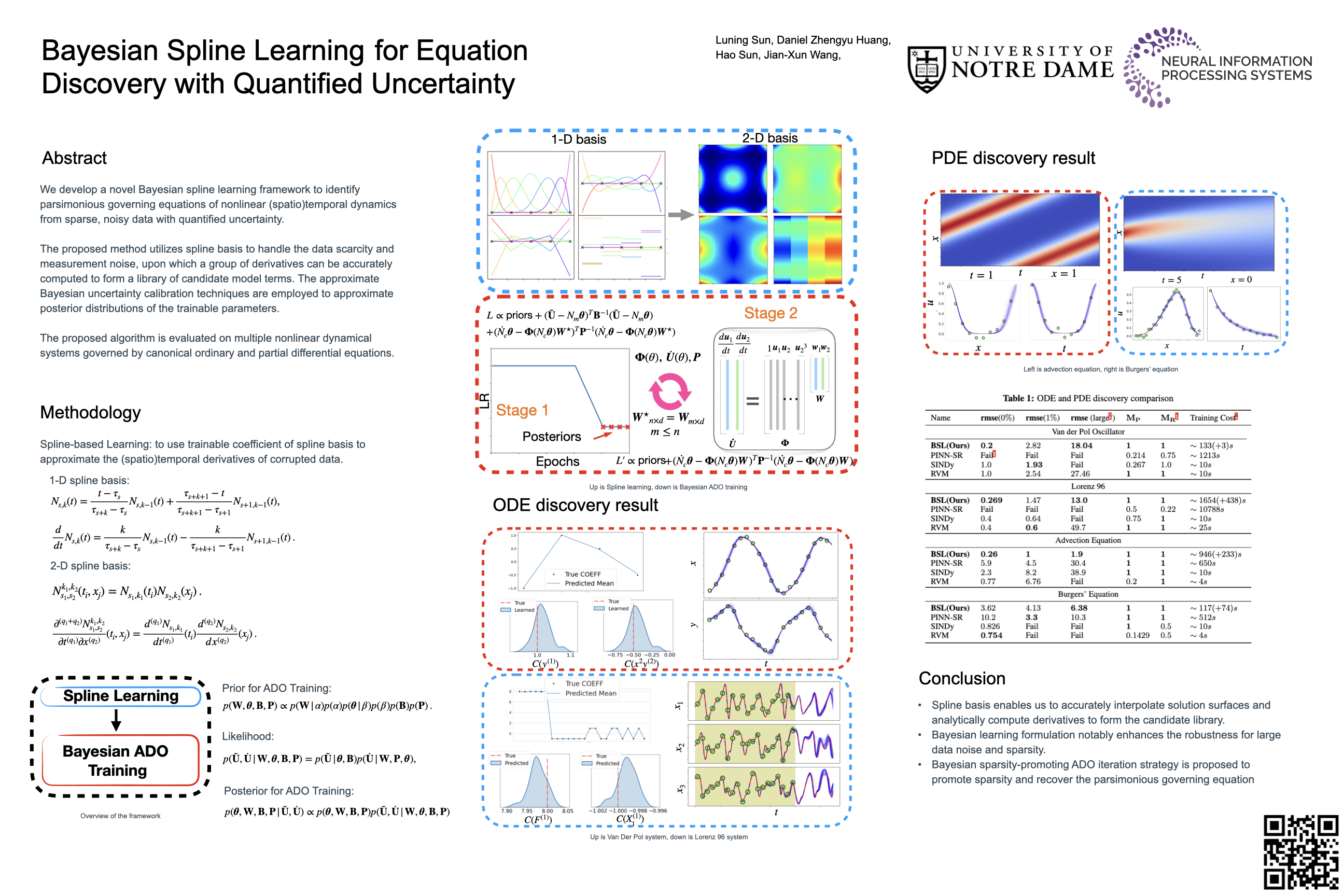
Abstract
Nonlinear dynamics are ubiquitous in science and engineering applications, but the physics of most complex systems is far from being fully understood. Discovering interpretable governing equations from measurement data can help us understand and predict the behavior of complex dynamic systems. Although extensive work has recently been done in this field, robustly distilling explicit model forms from very sparse data with considerable noise remains intractable. Moreover, quantifying and propagating the uncertainty of the identified system from noisy data is challenging, and relevant literature is still limited. To bridge this gap, we develop a novel Bayesian spline learning framework to identify parsimonious governing equations of nonlinear (spatio)temporal dynamics from sparse, noisy data with quantified uncertainty. The proposed method utilizes spline basis to handle the data scarcity and measurement noise, upon which a group of derivatives can be accurately computed to form a library of candidate model terms. The equation residuals are used to inform the spline learning in a Bayesian manner, where approximate Bayesian uncertainty calibration techniques are employed to approximate posterior distributions of the trainable parameters. To promote the sparsity, an iterative sequential-threshold Bayesian learning approach is developed, using the alternative direction optimization strategy to systematically approximate L0 sparsity constraints. The proposed algorithm is evaluated on multiple nonlinear dynamical systems governed by canonical ordinary and partial differential equations, and the merit/superiority of the proposed method is demonstrated by comparison with state-of-the-art methods.