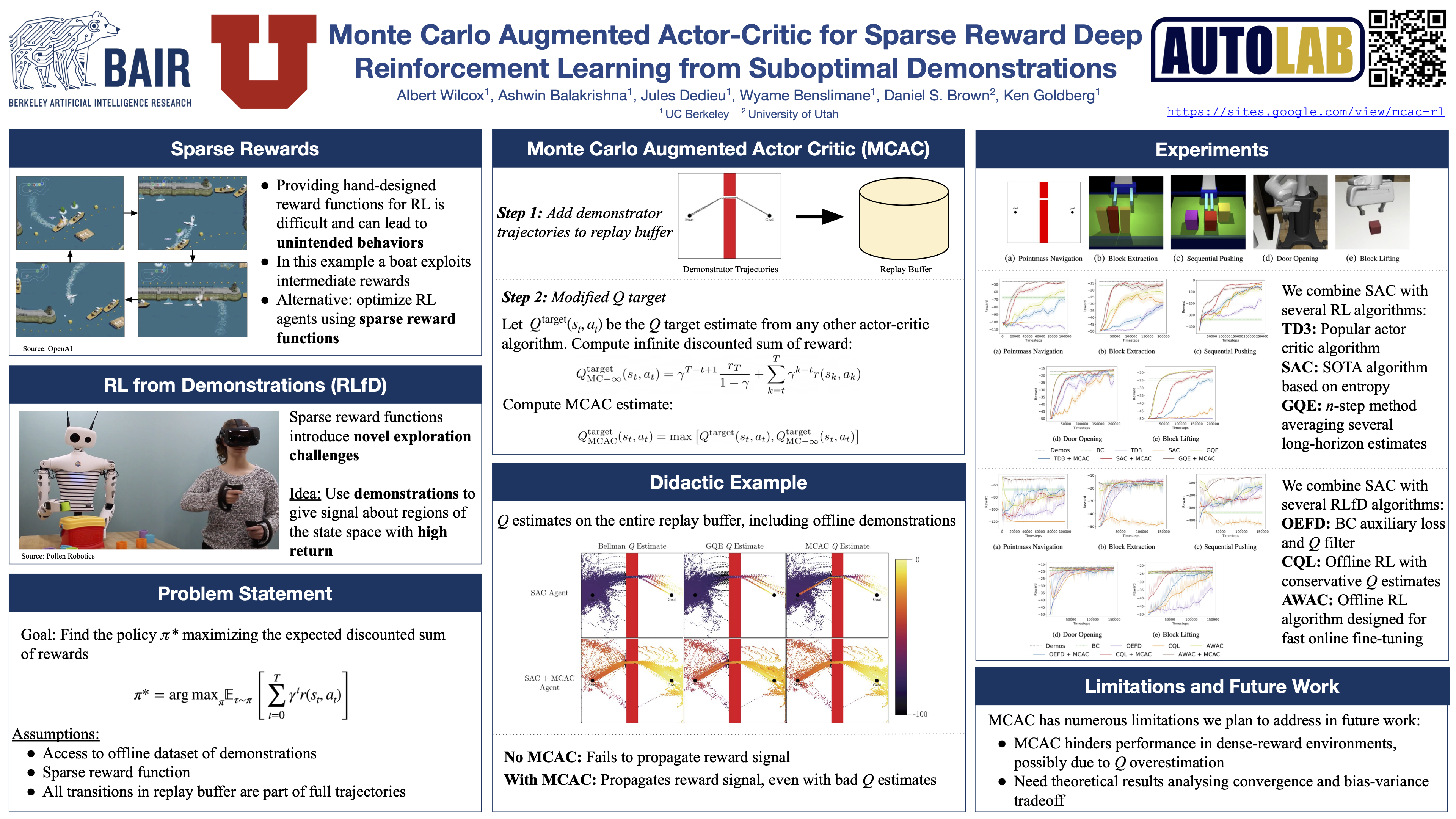
Monte Carlo Augmented Actor-Critic for Sparse Reward Deep Reinforcement Learning from Suboptimal Demonstrations
Albert Wilcox ⋅ Ashwin Balakrishna ⋅ Jules Dedieu ⋅ Wyame Benslimane ⋅ Daniel Brown ⋅ Ken Goldberg
Keywords:
online reinforcement learning
reinforcement learning from demonstrations
Reinforcement Learning
sparse reward reinforcement learning
2022 Poster
{kind=link}
Abstract
Providing densely shaped reward functions for RL algorithms is often exceedingly challenging, motivating the development of RL algorithms that can learn from easier-to-specify sparse reward functions. This sparsity poses new exploration challenges. One common way to address this problem is using demonstrations to provide initial signal about regions of the state space with high rewards. However, prior RL from demonstrations algorithms introduce significant complexity and many hyperparameters, making them hard to implement and tune. We introduce Monte Carlo Actor-Critic (MCAC), a parameter free modification to standard actor-critic algorithms which initializes the replay buffer with demonstrations and computes a modified $Q$-value by taking the maximum of the standard temporal distance (TD) target and a Monte Carlo estimate of the reward-to-go. This encourages exploration in the neighborhood of high-performing trajectories by encouraging high $Q$-values in corresponding regions of the state space. Experiments across $5$ continuous control domains suggest that MCAC can be used to significantly increase learning efficiency across $6$ commonly used RL and RL-from-demonstrations algorithms. See https://sites.google.com/view/mcac-rl for code and supplementary material.
Video
Chat is not available.
Successful Page Load