Latent Planning via Expansive Tree Search
{kind=link}
Abstract
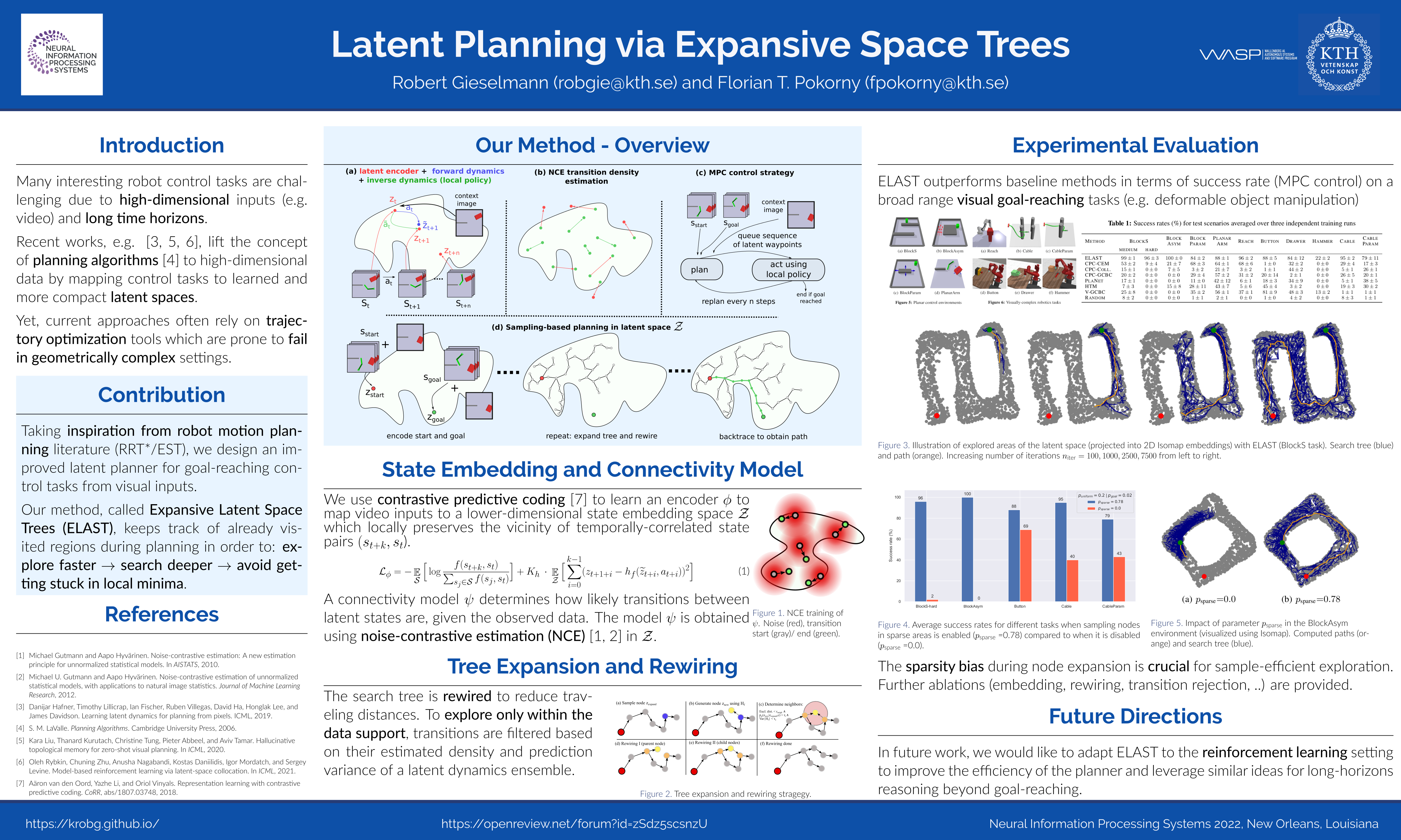
Planning enables autonomous agents to solve complex decision-making problems by evaluating predictions of the future. However, classical planning algorithms often become infeasible in real-world settings where state spaces are high-dimensional and transition dynamics unknown. The idea behind latent planning is to simplify the decision-making task by mapping it to a lower-dimensional embedding space. Common latent planning strategies are based on trajectory optimization techniques such as shooting or collocation, which are prone to failure in long-horizon and highly non-convex settings. In this work, we study long-horizon goal-reaching scenarios from visual inputs and formulate latent planning as an explorative tree search. Inspired by classical sampling-based motion planning algorithms, we design a method which iteratively grows and optimizes a tree representation of visited areas of the latent space. To encourage fast exploration, the sampling of new states is biased towards sparsely represented regions within the estimated data support. Our method, called Expansive Latent Space Trees (ELAST), relies on self-supervised training via contrastive learning to obtain (a) a latent state representation and (b) a latent transition density model. We embed ELAST into a model-predictive control scheme and demonstrate significant performance improvements compared to existing baselines given challenging visual control tasks in simulation, including the navigation for a deformable object.