Effective Adaptation in Multi-Task Co-Training for Unified Autonomous Driving
{kind=link}
Abstract
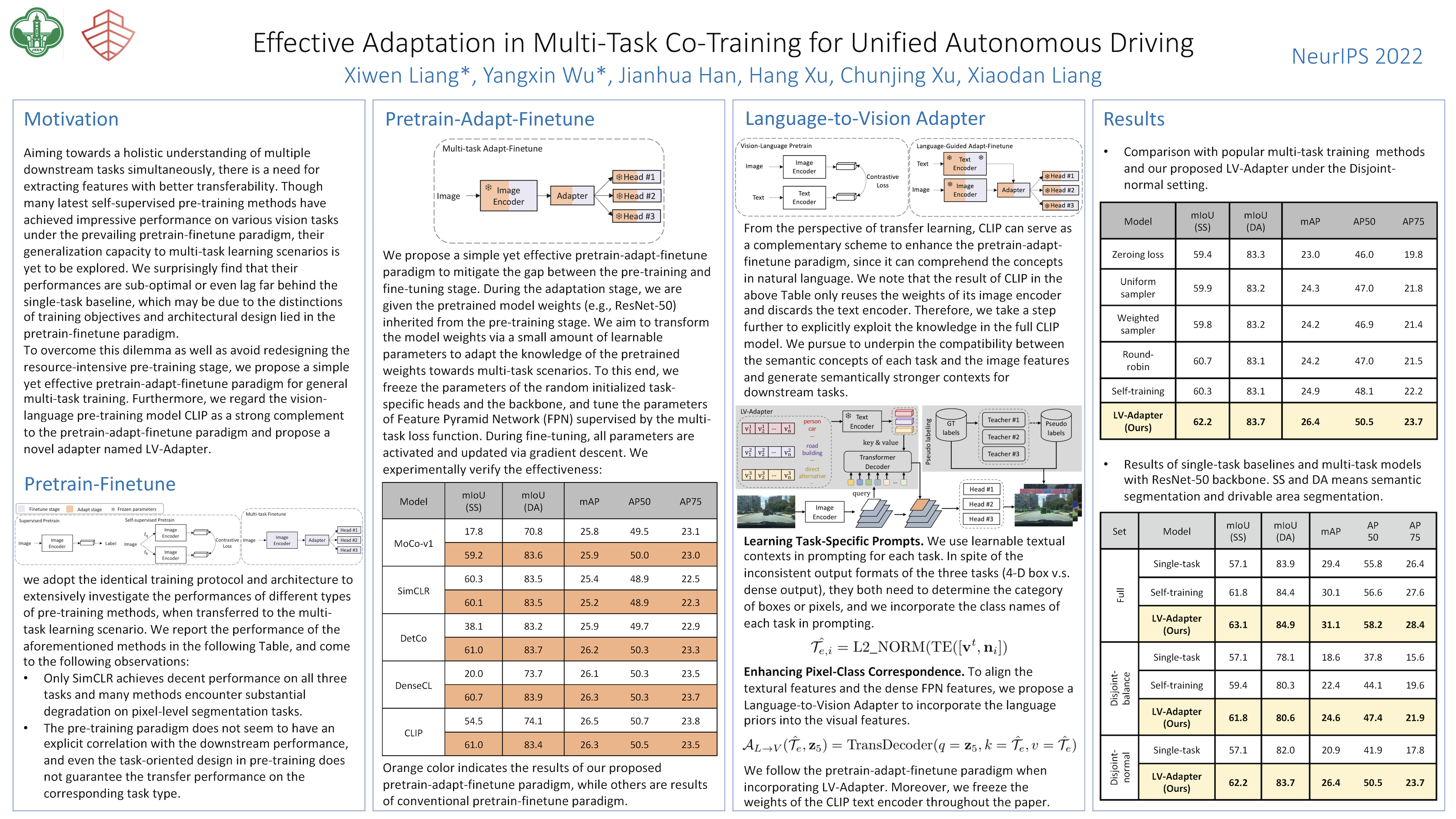
Aiming towards a holistic understanding of multiple downstream tasks simultaneously, there is a need for extracting features with better transferability. Though many latest self-supervised pre-training methods have achieved impressive performance on various vision tasks under the prevailing pretrain-finetune paradigm, their generalization capacity to multi-task learning scenarios is yet to be explored. In this paper, we extensively investigate the transfer performance of various types of self-supervised methods, e.g., MoCo and SimCLR, on three downstream tasks, including semantic segmentation, drivable area segmentation, and traffic object detection, on the large-scale driving dataset BDD100K. We surprisingly find that their performances are sub-optimal or even lag far behind the single-task baseline, which may be due to the distinctions of training objectives and architectural design lied in the pretrain-finetune paradigm. To overcome this dilemma as well as avoid redesigning the resource-intensive pre-training stage, we propose a simple yet effective pretrain-adapt-finetune paradigm for general multi-task training, where the off-the-shelf pretrained models can be effectively adapted without increasing the training overhead. During the adapt stage, we utilize learnable multi-scale adapters to dynamically adjust the pretrained model weights supervised by multi-task objectives while leaving the pretrained knowledge untouched. Furthermore, we regard the vision-language pre-training model CLIP as a strong complement to the pretrain-adapt-finetune paradigm and propose a novel adapter named LV-Adapter, which incorporates language priors in the multi-task model via task-specific prompting and alignment between visual and textual features. Our experiments demonstrate that the adapt stage significantly improves the overall performance of those off-the-shelf pretrained models and the contextual features generated by LV-Adapter are of general benefits for downstream tasks.