A Closer Look at Offline RL Agents
{kind=link}
Abstract
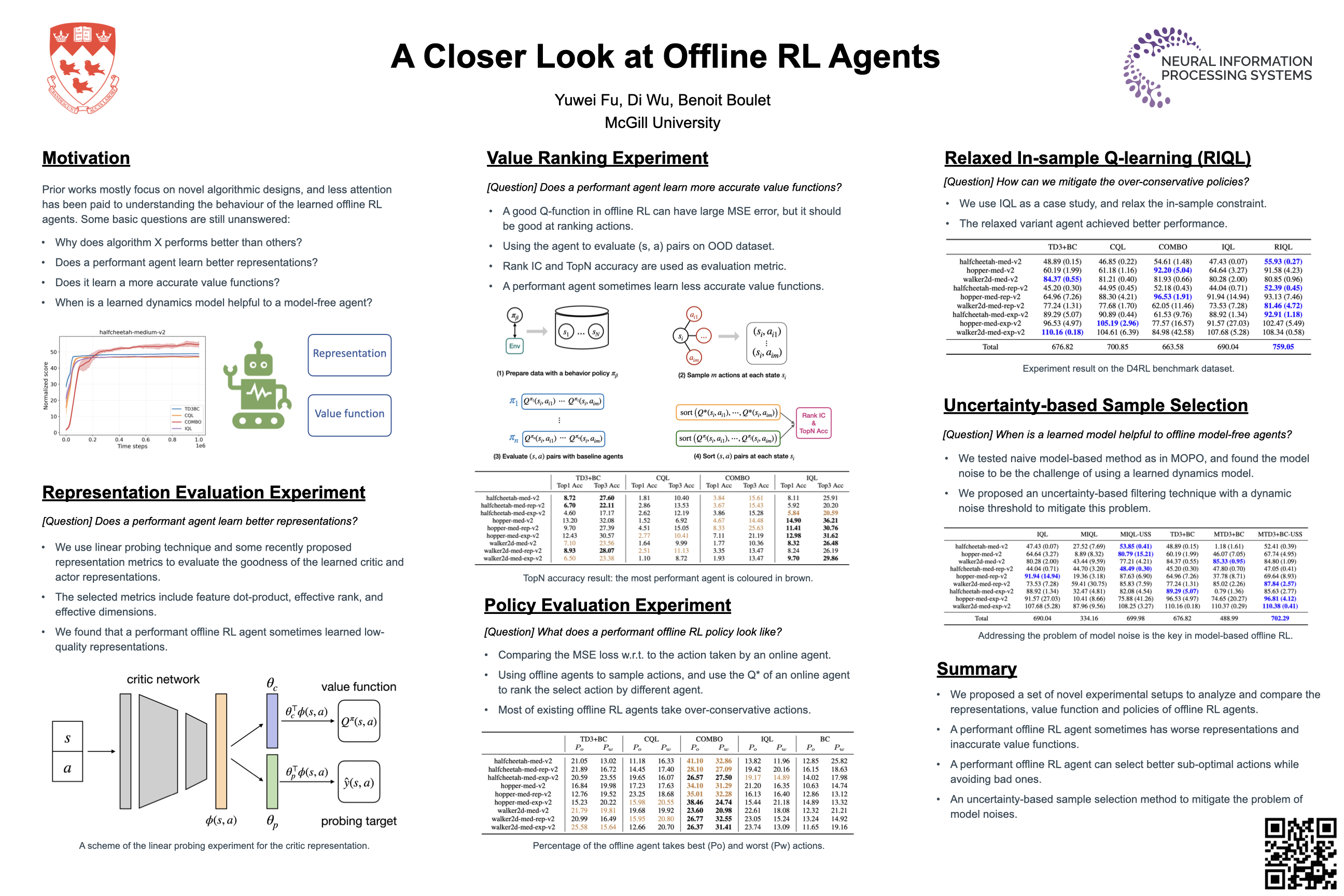
Despite recent advances in the field of Offline Reinforcement Learning (RL), less attention has been paid to understanding the behaviors of learned RL agents. As a result, there remain some gaps in our understandings, i.e., why is one offline RL agent more performant than another? In this work, we first introduce a set of experiments to evaluate offline RL agents, focusing on three fundamental aspects: representations, value functions and policies. Counterintuitively, we show that a more performant offline RL agent can learn relatively low-quality representations and inaccurate value functions. Furthermore, we showcase that the proposed experiment setups can be effectively used to diagnose the bottleneck of offline RL agents. Inspired by the evaluation results, a novel offline RL algorithm is proposed by a simple modification of IQL and achieves SOTA performance. Finally, we investigate when a learned dynamics model is helpful to model-free offline RL agents, and introduce an uncertainty-based sample selection method to mitigate the problem of model noises. Code is available at: https://github.com/fuyw/RIQL.