Neural Collapse with Normalized Features: A Geometric Analysis over the Riemannian Manifold
{kind=link}
Abstract
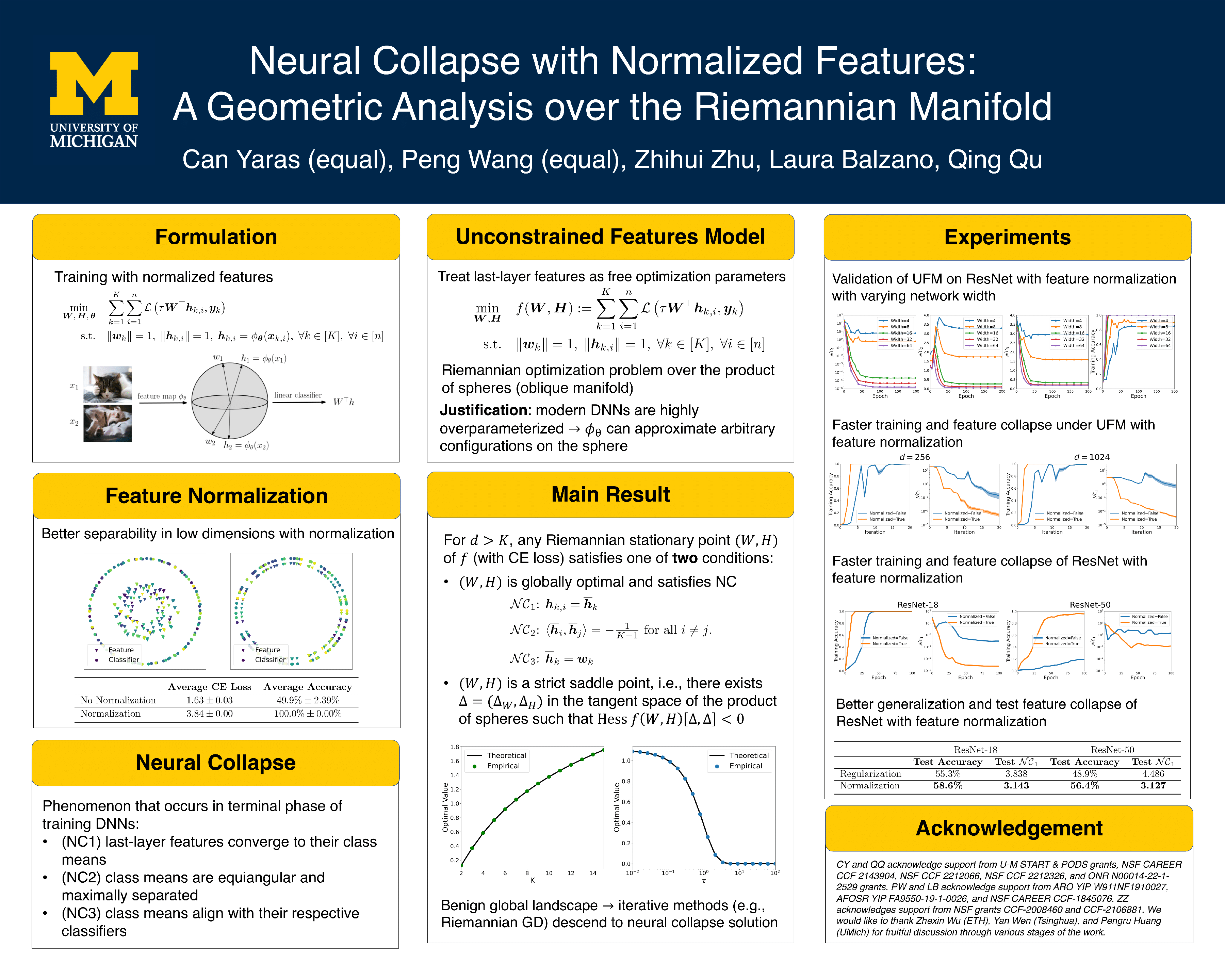
When training overparameterized deep networks for classification tasks, it has been widely observed that the learned features exhibit a so-called "neural collapse'" phenomenon. More specifically, for the output features of the penultimate layer, for each class the within-class features converge to their means, and the means of different classes exhibit a certain tight frame structure, which is also aligned with the last layer's classifier. As feature normalization in the last layer becomes a common practice in modern representation learning, in this work we theoretically justify the neural collapse phenomenon under normalized features. Based on an unconstrained feature model, we simplify the empirical loss function in a multi-class classification task into a nonconvex optimization problem over the Riemannian manifold by constraining all features and classifiers over the sphere. In this context, we analyze the nonconvex landscape of the Riemannian optimization problem over the product of spheres, showing a benign global landscape in the sense that the only global minimizers are the neural collapse solutions while all other critical points are strict saddle points with negative curvature. Experimental results on practical deep networks corroborate our theory and demonstrate that better representations can be learned faster via feature normalization. Code for our experiments can be found at https://github.com/cjyaras/normalized-neural-collapse.