Unifying Voxel-based Representation with Transformer for 3D Object Detection
{kind=link}
Abstract
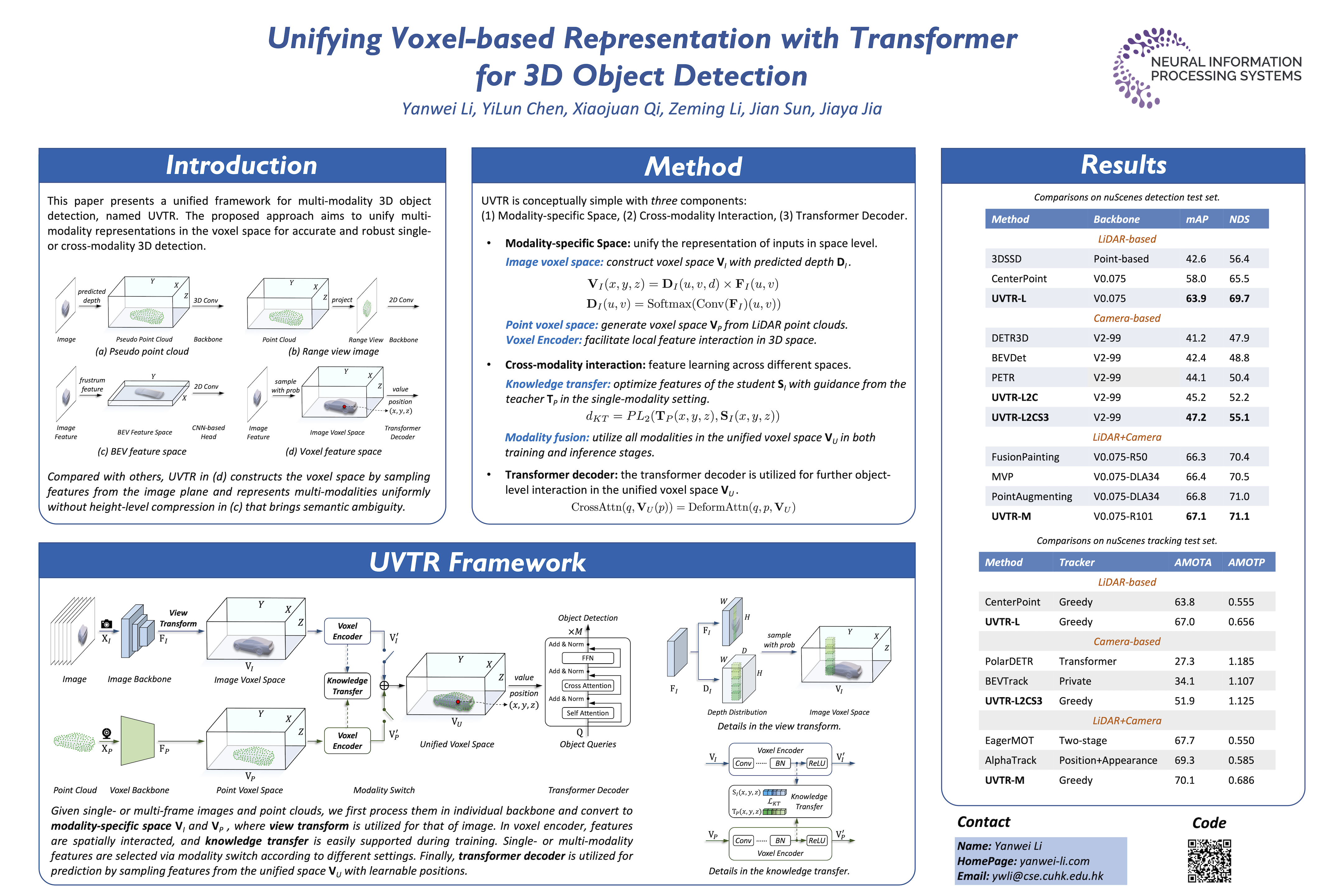
In this work, we present a unified framework for multi-modality 3D object detection, named UVTR. The proposed method aims to unify multi-modality representations in the voxel space for accurate and robust single- or cross-modality 3D detection. To this end, the modality-specific space is first designed to represent different inputs in the voxel feature space. Different from previous work, our approach preserves the voxel space without height compression to alleviate semantic ambiguity and enable spatial connections. To make full use of the inputs from different sensors, the cross-modality interaction is then proposed, including knowledge transfer and modality fusion. In this way, geometry-aware expressions in point clouds and context-rich features in images are well utilized for better performance and robustness. The transformer decoder is applied to efficiently sample features from the unified space with learnable positions, which facilitates object-level interactions. In general, UVTR presents an early attempt to represent different modalities in a unified framework. It surpasses previous work in single- or multi-modality entries. The proposed method achieves leading performance in the nuScenes test set for both object detection and the following object tracking task. Code is made publicly available at https://github.com/dvlab-research/UVTR.