Understanding Deep Neural Function Approximation in Reinforcement Learning via $\epsilon$-Greedy Exploration
Fanghui Liu ⋅ Luca Viano ⋅ Volkan Cevher
2022 Poster
{kind=link}
Abstract
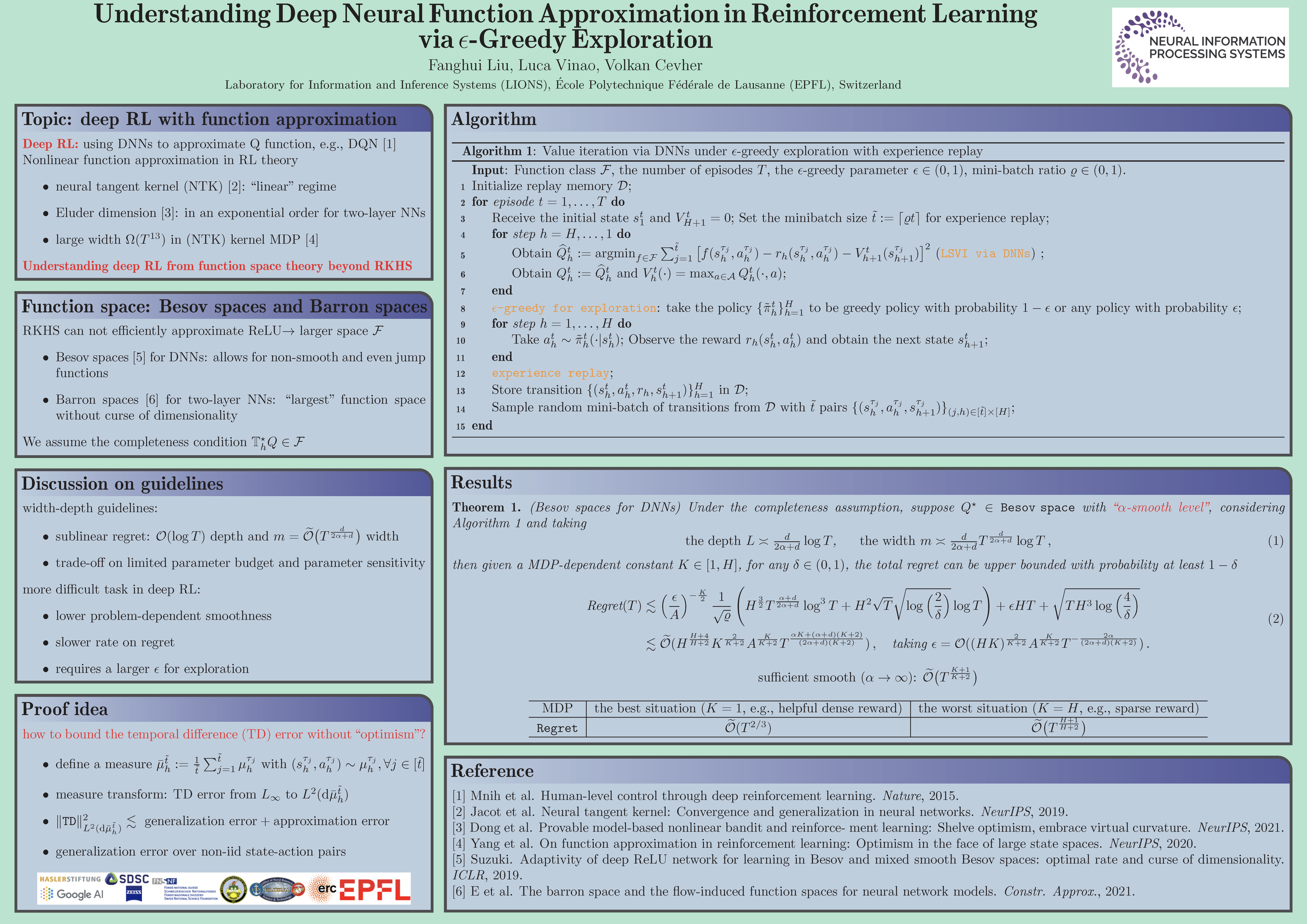
This paper provides a theoretical study of deep neural function approximation in reinforcement learning (RL) with the $\epsilon$-greedy exploration under the online setting. This problem setting is motivated by the successful deep Q-networks (DQN) framework that falls in this regime. In this work, we provide an initial attempt on theoretical understanding deep RL from the perspective of function class and neural networks architectures (e.g., width and depth) beyond the ``linear'' regime. To be specific, we focus on the value based algorithm with the $\epsilon$-greedy exploration via deep (and two-layer) neural networks endowed by Besov (and Barron) function spaces, respectively, which aims at approximating an $\alpha$-smooth Q-function in a $d$-dimensional feature space. We prove that, with $T$ episodes, scaling the width $m = \widetilde{\mathcal{O}}(T^{\frac{d}{2\alpha + d}})$ and the depth $L=\mathcal{O}(\log T)$ of the neural network for deep RL is sufficient for learning with sublinear regret in Besov spaces. Moreover, for a two layer neural network endowed by the Barron space, scaling the width $\Omega(\sqrt{T})$ is sufficient. To achieve this, the key issue in our analysis is how to estimate the temporal difference error under deep neural function approximation as the $\epsilon$-greedy exploration is not enough to ensure "optimism". Our analysis reformulates the temporal difference error in an $L^2(\mathrm{d}\mu)$-integrable space over a certain averaged measure $\mu$, and transforms it to a generalization problem under the non-iid setting. This might have its own interest in RL theory for better understanding $\epsilon$-greedy exploration in deep RL.
Video
Chat is not available.
Successful Page Load