BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework
{kind=link}
Abstract
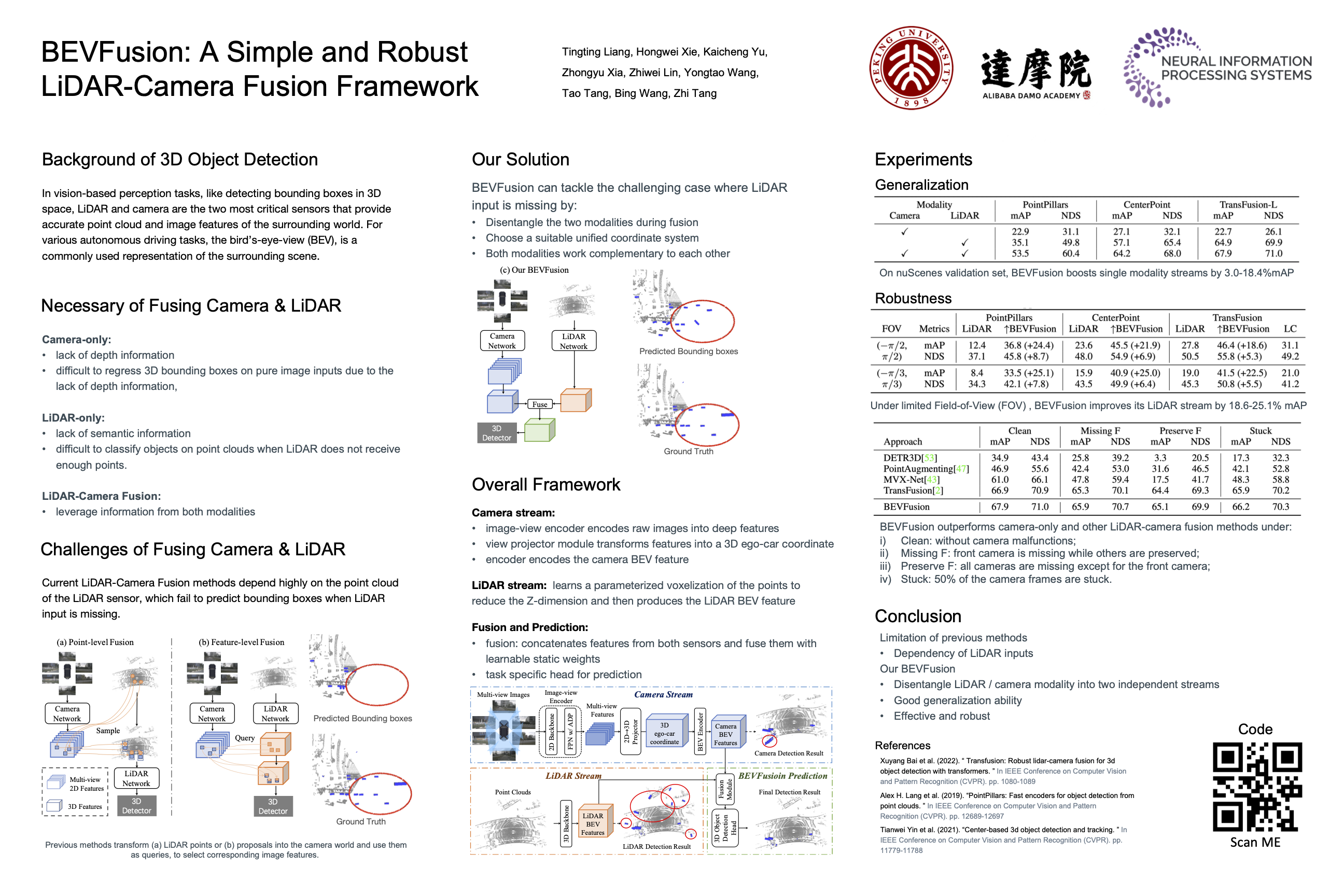
Fusing the camera and LiDAR information has become a de-facto standard for 3D object detection tasks. Current methods rely on point clouds from the LiDAR sensor as queries to leverage the feature from the image space. However, people discovered that this underlying assumption makes the current fusion framework infeasible to produce any prediction when there is a LiDAR malfunction, regardless of minor or major. This fundamentally limits the deployment capability to realistic autonomous driving scenarios. In contrast, we propose a surprisingly simple yet novel fusion framework, dubbed BEVFusion, whose camera stream does not depend on the input of LiDAR data, thus addressing the downside of previous methods. We empirically show that our framework surpasses the state-of-the-art methods under the normal training settings. Under the robustness training settings that simulate various LiDAR malfunctions, our framework significantly surpasses the state-of-the-art methods by 15.7% to 28.9% mAP. To the best of our knowledge, we are the first to handle realistic LiDAR malfunction and can be deployed to realistic scenarios without any post-processing procedure.