Neural Surface Reconstruction of Dynamic Scenes with Monocular RGB-D Camera
{kind=link}
Abstract
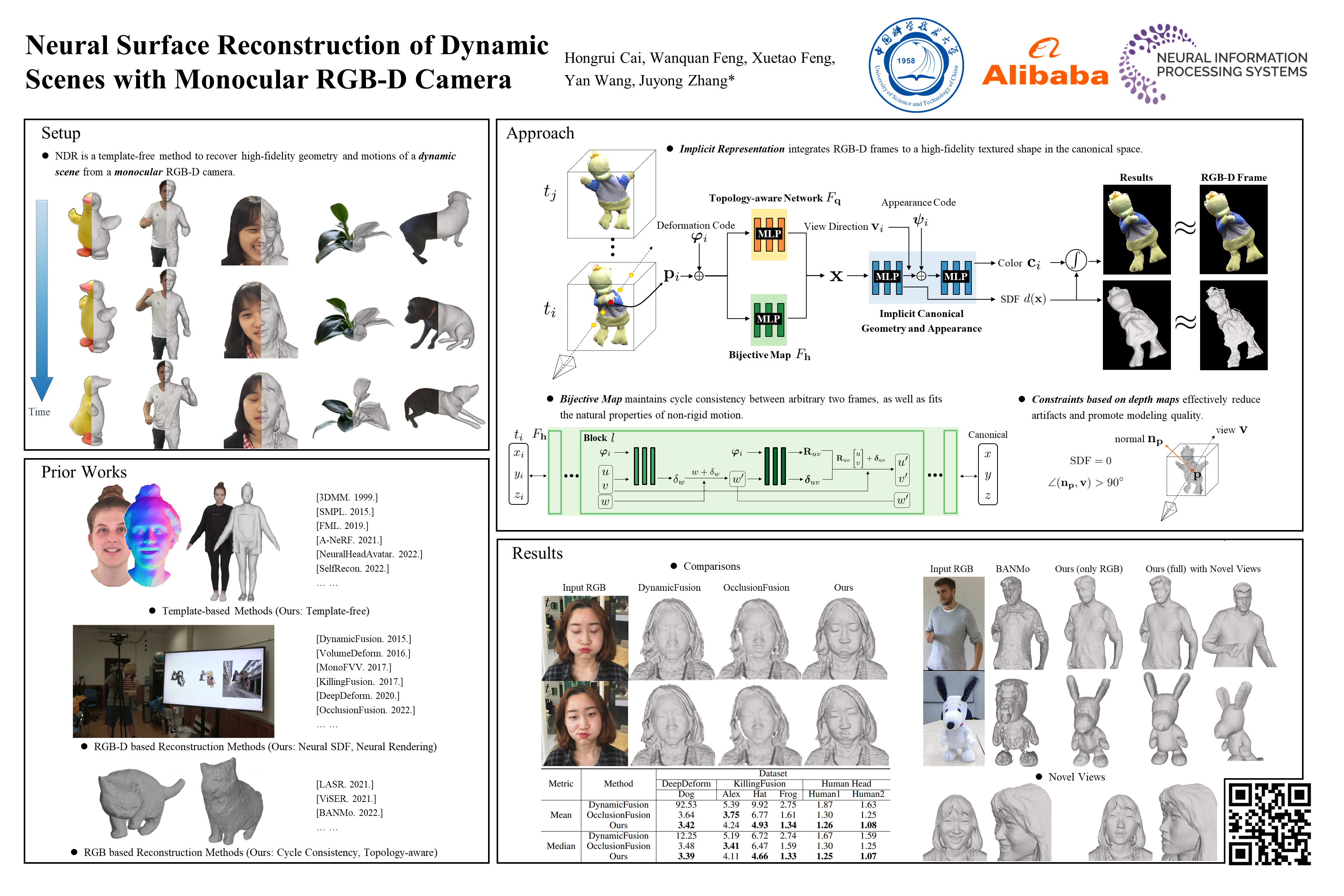
We propose Neural-DynamicReconstruction (NDR), a template-free method to recover high-fidelity geometry and motions of a dynamic scene from a monocular RGB-D camera. In NDR, we adopt the neural implicit function for surface representation and rendering such that the captured color and depth can be fully utilized to jointly optimize the surface and deformations. To represent and constrain the non-rigid deformations, we propose a novel neural invertible deforming network such that the cycle consistency between arbitrary two frames is automatically satisfied. Considering that the surface topology of dynamic scene might change over time, we employ a topology-aware strategy to construct the topology-variant correspondence for the fused frames. NDR also further refines the camera poses in a global optimization manner. Experiments on public datasets and our collected dataset demonstrate that NDR outperforms existing monocular dynamic reconstruction methods.