One-Inlier is First: Towards Efficient Position Encoding for Point Cloud Registration
{kind=link}
Abstract
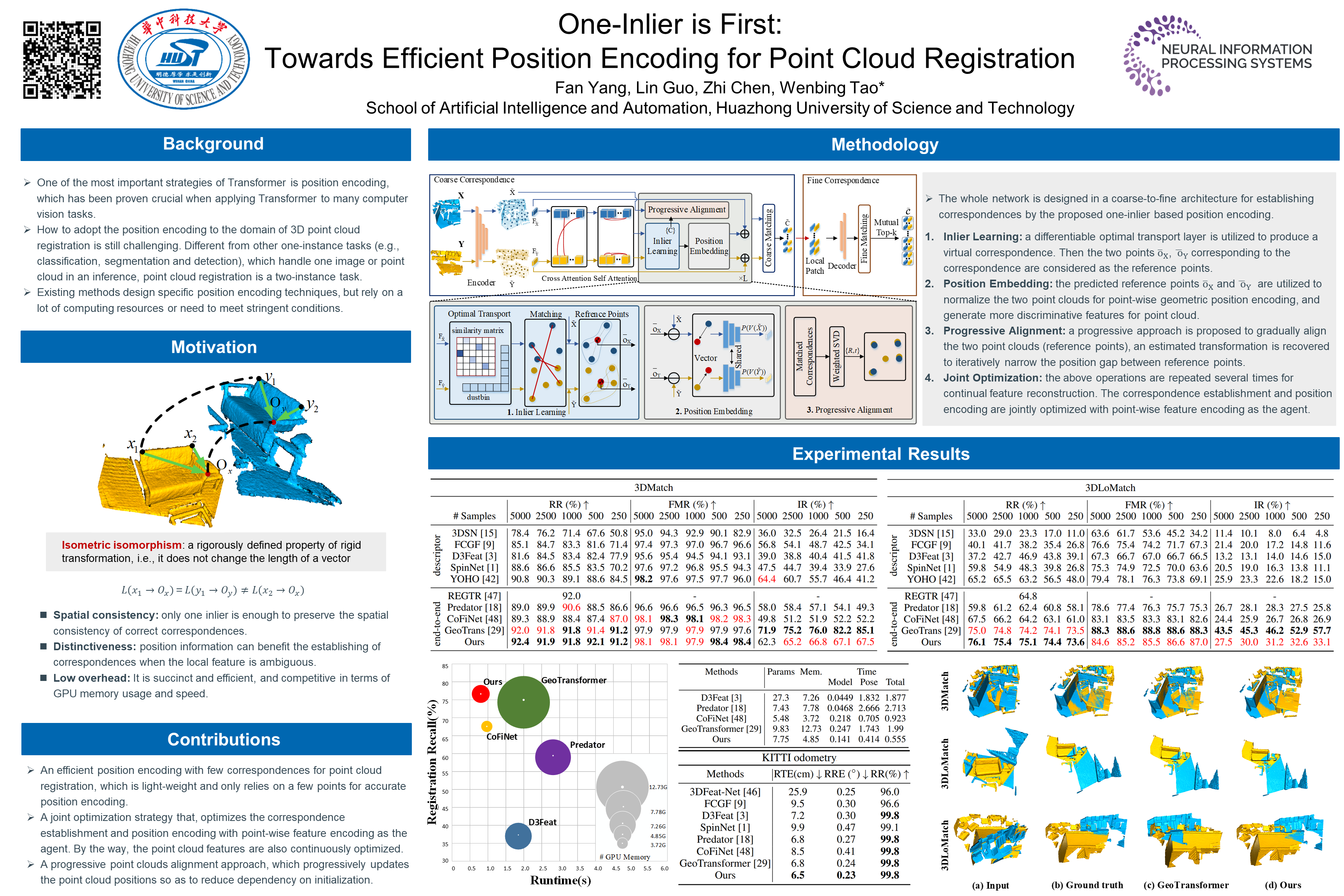
Transformer architecture has shown great potential for many visual tasks, including point cloud registration. As an order-aware module, position encoding plays an important role in Transformer architecture applied to point cloud registration task. In this paper, we propose OIF-PCR, a one-inlier based position encoding method for point cloud registration network. Specifically, we first find one correspondence by a differentiable optimal transport layer, and use it to normalize each point for position encoding. It can eliminate the challenges brought by the different reference frames of two point clouds, and mitigate the feature ambiguity by learning the spatial consistency. Then, we propose a joint approach for establishing correspondence and position encoding, presenting an iterative optimization process. Finally, we design a progressive way for point cloud alignment and feature learning to gradually optimize the rigid transformation. The proposed position encoding is very efficient, requiring only a small addition of memory and computing overhead. Extensive experiments demonstrate the proposed method can achieve competitive performance with the state-of-the-art methods in both indoor and outdoor scenes.