Transformer-based Working Memory for Multiagent Reinforcement Learning with Action Parsing
{kind=link}
Abstract
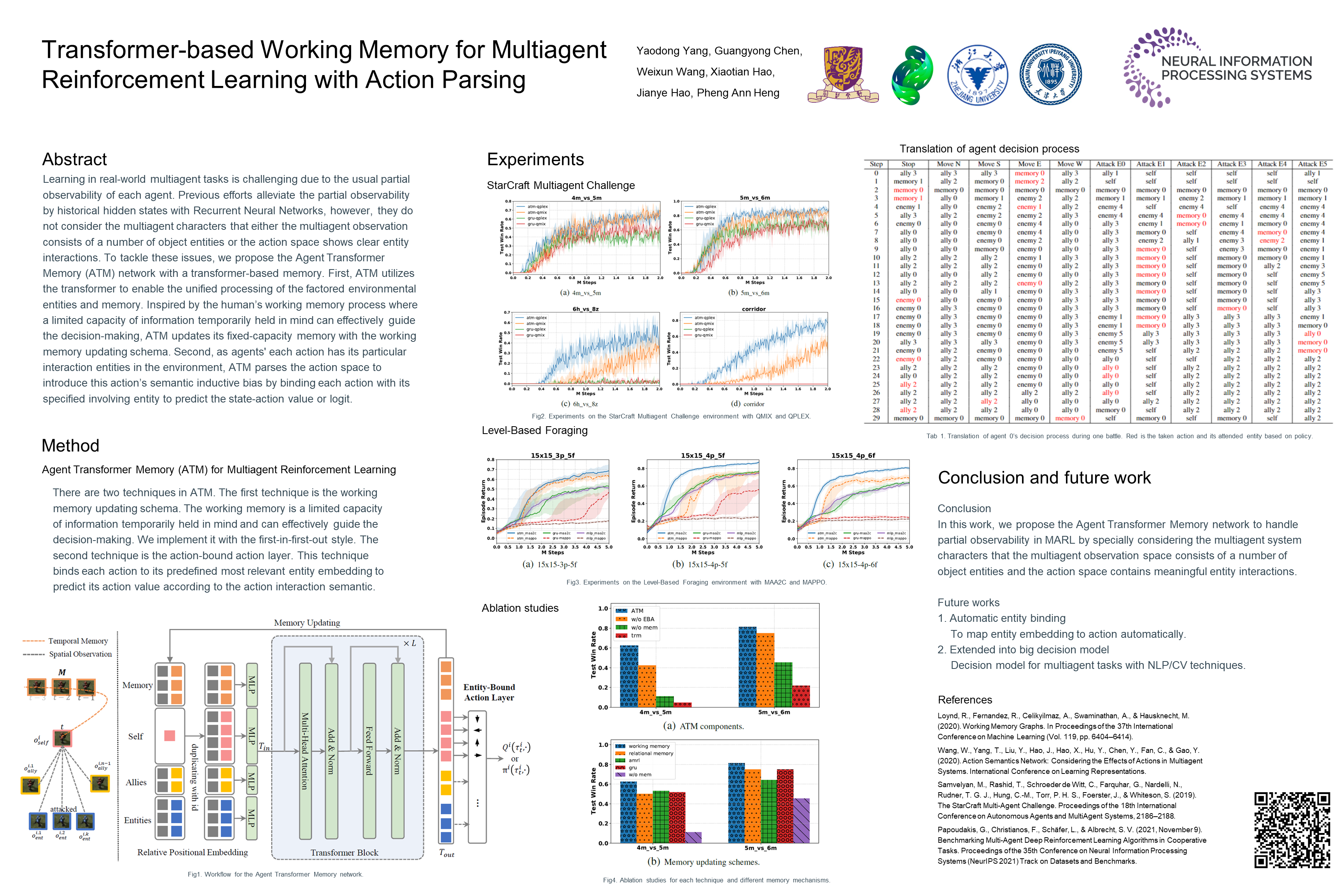
Learning in real-world multiagent tasks is challenging due to the usual partial observability of each agent. Previous efforts alleviate the partial observability by historical hidden states with Recurrent Neural Networks, however, they do not consider the multiagent characters that either the multiagent observation consists of a number of object entities or the action space shows clear entity interactions. To tackle these issues, we propose the Agent Transformer Memory (ATM) network with a transformer-based memory. First, ATM utilizes the transformer to enable the unified processing of the factored environmental entities and memory. Inspired by the human’s working memory process where a limited capacity of information temporarily held in mind can effectively guide the decision-making, ATM updates its fixed-capacity memory with the working memory updating schema. Second, as agents' each action has its particular interaction entities in the environment, ATM parses the action space to introduce this action’s semantic inductive bias by binding each action with its specified involving entity to predict the state-action value or logit. Extensive experiments on the challenging SMAC and Level-Based Foraging environments validate that ATM could boost existing multiagent RL algorithms with impressive learning acceleration and performance improvement.