Trajectory-guided Control Prediction for End-to-end Autonomous Driving: A Simple yet Strong Baseline
{kind=link}
Abstract
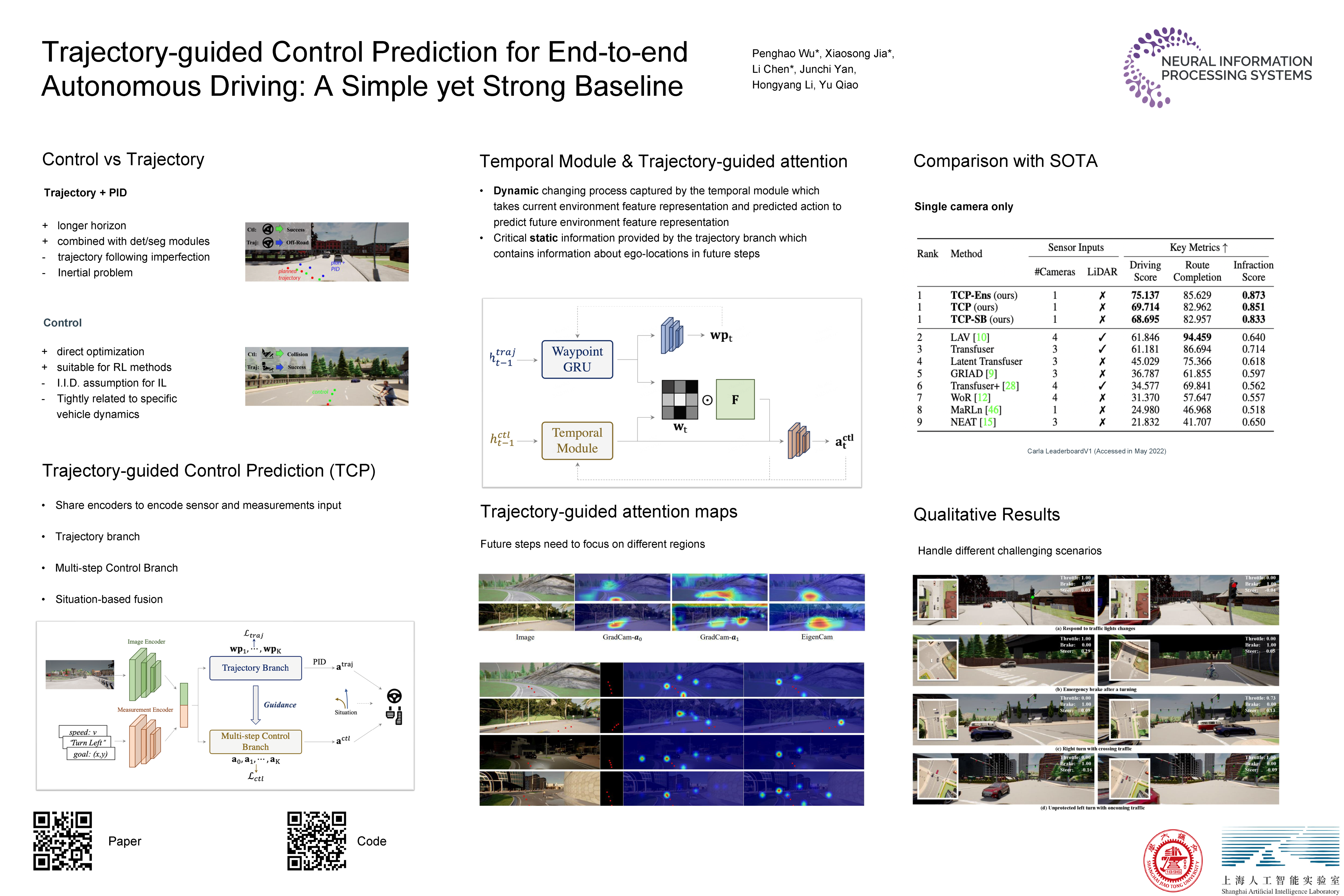
Current end-to-end autonomous driving methods either run a controller based on a planned trajectory or perform control prediction directly, which have spanned two separately studied lines of research. Seeing their potential mutual benefits to each other, this paper takes the initiative to explore the combination of these two well-developed worlds. Specifically, our integrated approach has two branches for trajectory planning and direct control, respectively. The trajectory branch predicts the future trajectory, while the control branch involves a novel multi-step prediction scheme such that the relationship between current actions and future states can be reasoned. The two branches are connected so that the control branch receives corresponding guidance from the trajectory branch at each time step. The outputs from two branches are then fused to achieve complementary advantages. Our results are evaluated in the closed-loop urban driving setting with challenging scenarios using the CARLA simulator. Even with a monocular camera input, the proposed approach ranks first on the official CARLA Leaderboard, outperforming other complex candidates with multiple sensors or fusion mechanisms by a large margin. The sourcecode is publicly available at https://github.com/OpenPerceptionX/TCP