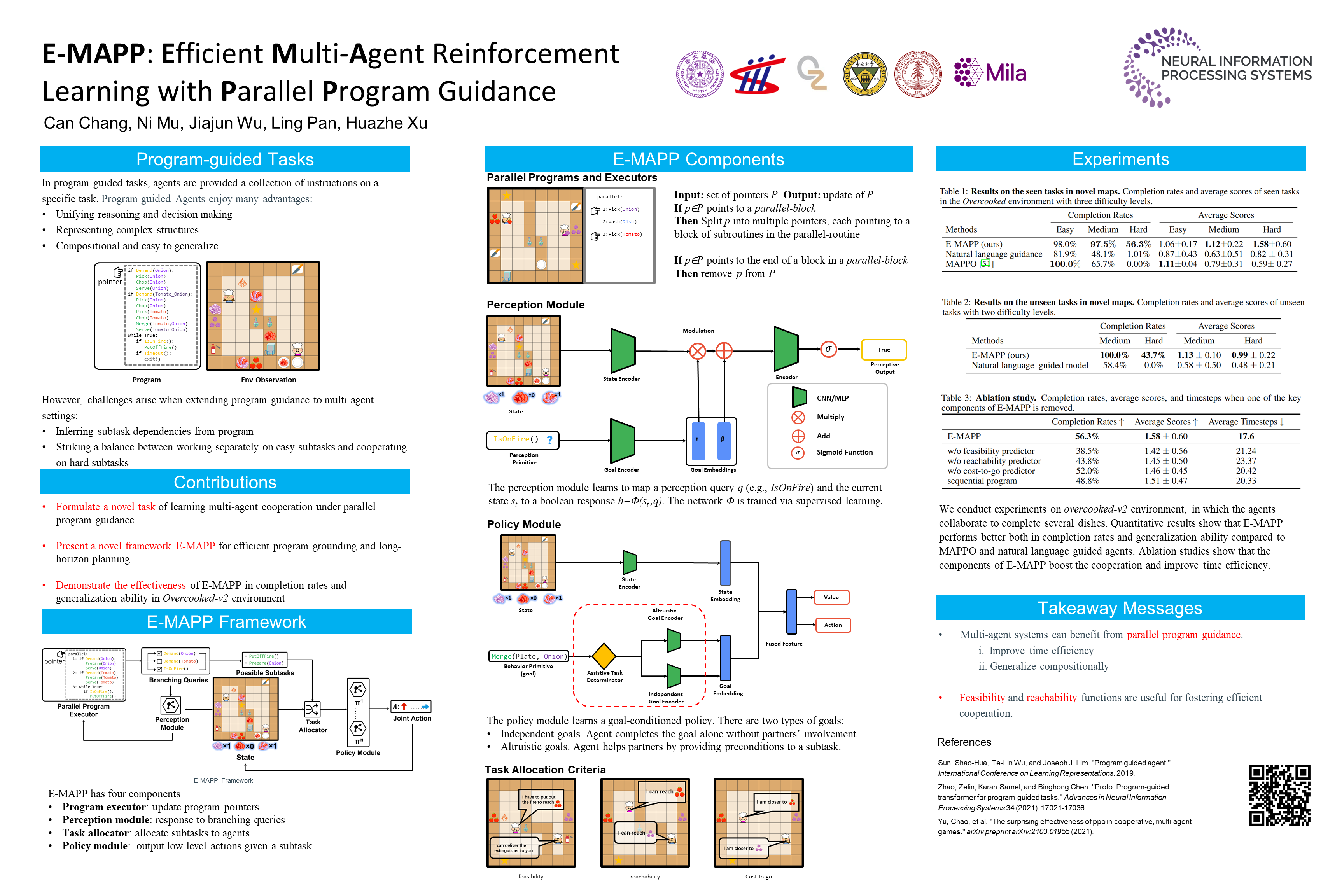
E-MAPP: Efficient Multi-Agent Reinforcement Learning with Parallel Program Guidance
Can Chang ⋅ Ni Mu ⋅ Jiajun Wu ⋅ Ling Pan ⋅ Huazhe Xu
2022 Poster
{kind=link}
Abstract
A critical challenge in multi-agent reinforcement learning(MARL) is for multiple agents to efficiently accomplish complex, long-horizon tasks. The agents often have difficulties in cooperating on common goals, dividing complex tasks, and planning through several stages to make progress. We propose to address these challenges by guiding agents with programs designed for parallelization, since programs as a representation contain rich structural and semantic information, and are widely used as abstractions for long-horizon tasks. Specifically, we introduce Efficient Multi-Agent Reinforcement Learning with Parallel Program Guidance(E-MAPP), a novel framework that leverages parallel programs to guide multiple agents to efficiently accomplish goals that require planning over $10+$ stages. E-MAPP integrates the structural information from a parallel program, promotes the cooperative behaviors grounded in program semantics, and improves the time efficiency via a task allocator. We conduct extensive experiments on a series of challenging, long-horizon cooperative tasks in the Overcooked environment. Results show that E-MAPP outperforms strong baselines in terms of the completion rate, time efficiency, and zero-shot generalization ability by a large margin.
Video
Chat is not available.
Successful Page Load