Towards Efficient 3D Object Detection with Knowledge Distillation
Jihan Yang ⋅ Shaoshuai Shi ⋅ Runyu Ding ⋅ Zhe Wang ⋅ Xiaojuan Qi
{kind=link}
Abstract
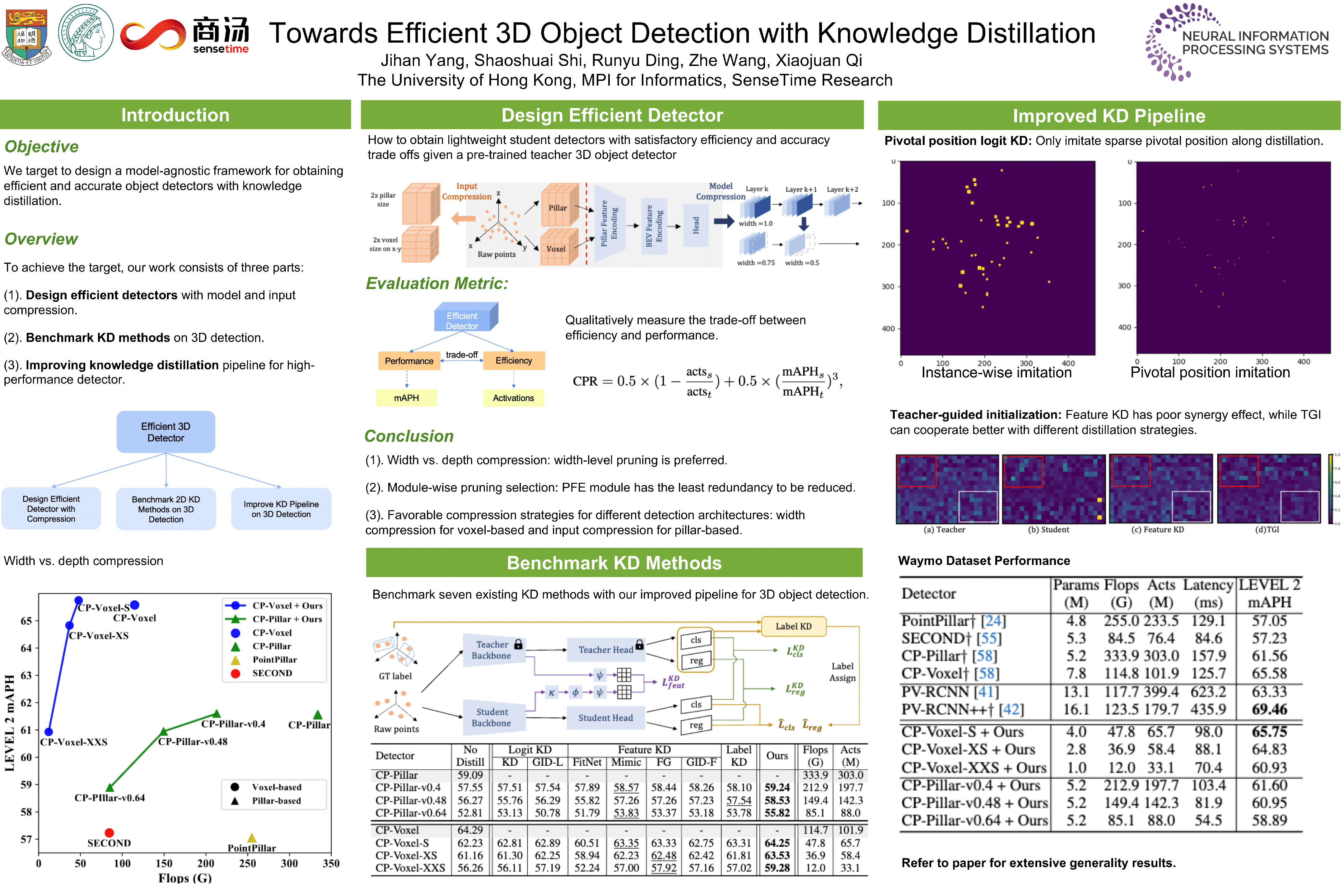
Despite substantial progress in 3D object detection, advanced 3D detectors often suffer from heavy computation overheads. To this end, we explore the potential of knowledge distillation (KD) for developing efficient 3D object detectors, focusing on popular pillar- and voxel-based detectors. In the absence of well-developed teacher-student pairs, we first study how to obtain student models with good trade offs between accuracy and efficiency from the perspectives of model compression and input resolution reduction. Then, we build a benchmark to assess existing KD methods developed in the 2D domain for 3D object detection upon six well-constructed teacher-student pairs. Further, we propose an improved KD pipeline incorporating an enhanced logit KD method that performs KD on only a few pivotal positions determined by teacher classification response and a teacher-guided student model initialization to facilitate transferring teacher model's feature extraction ability to students through weight inheritance. Finally, we conduct extensive experiments on the Waymo dataset. Our best performing model achieves $65.75\%$ LEVEL 2 mAPH surpassing its teacher model and requiring only $44\%$ of teacher flops. Our most efficient model runs 51 FPS on an NVIDIA A100, which is $2.2\times$ faster than PointPillar with even higher accuracy. Code will be available.
Video
Chat is not available.
Successful Page Load