Independence Testing-Based Approach to Causal Discovery under Measurement Error and Linear Non-Gaussian Models
{kind=link}
Abstract
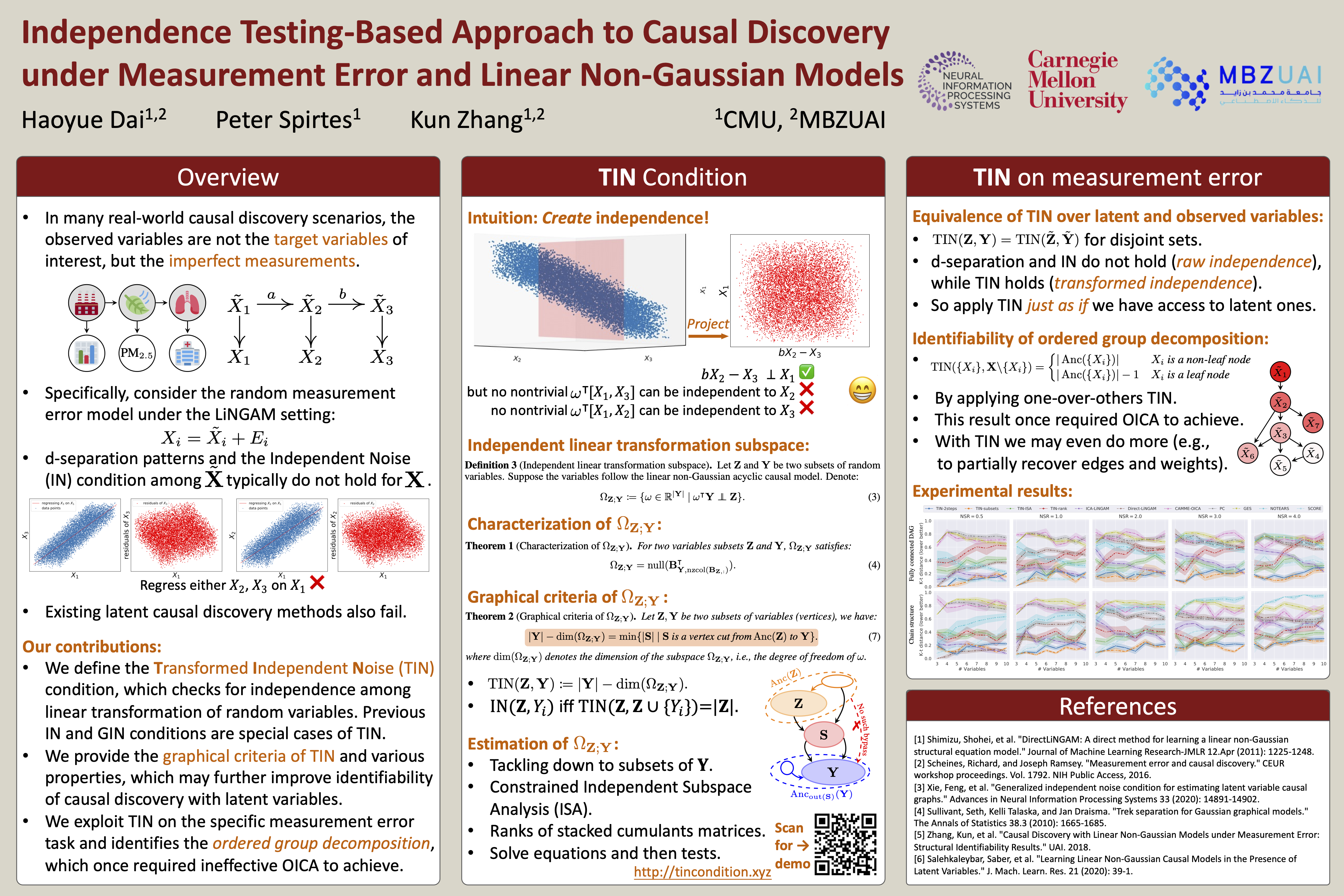
Causal discovery aims to recover causal structures generating the observational data. Despite its success in certain problems, in many real-world scenarios the observed variables are not the target variables of interest, but the imperfect measures of the target variables. Causal discovery under measurement error aims to recover the causal graph among unobserved target variables from observations made with measurement error. We consider a specific formulation of the problem, where the unobserved target variables follow a linear non-Gaussian acyclic model, and the measurement process follows the random measurement error model. Existing methods on this formulation rely on non-scalable over-complete independent component analysis (OICA). In this work, we propose the Transformed Independent Noise (TIN) condition, which checks for independence between a specific linear transformation of some measured variables and certain other measured variables. By leveraging the non-Gaussianity and higher-order statistics of data, TIN is informative about the graph structure among the unobserved target variables. By utilizing TIN, the ordered group decomposition of the causal model is identifiable. In other words, we could achieve what once required OICA to achieve by only conducting independence tests. Experimental results on both synthetic and real-world data demonstrate the effectiveness and reliability of our method.