K-Radar: 4D Radar Object Detection for Autonomous Driving in Various Weather Conditions
{kind=link}
Abstract
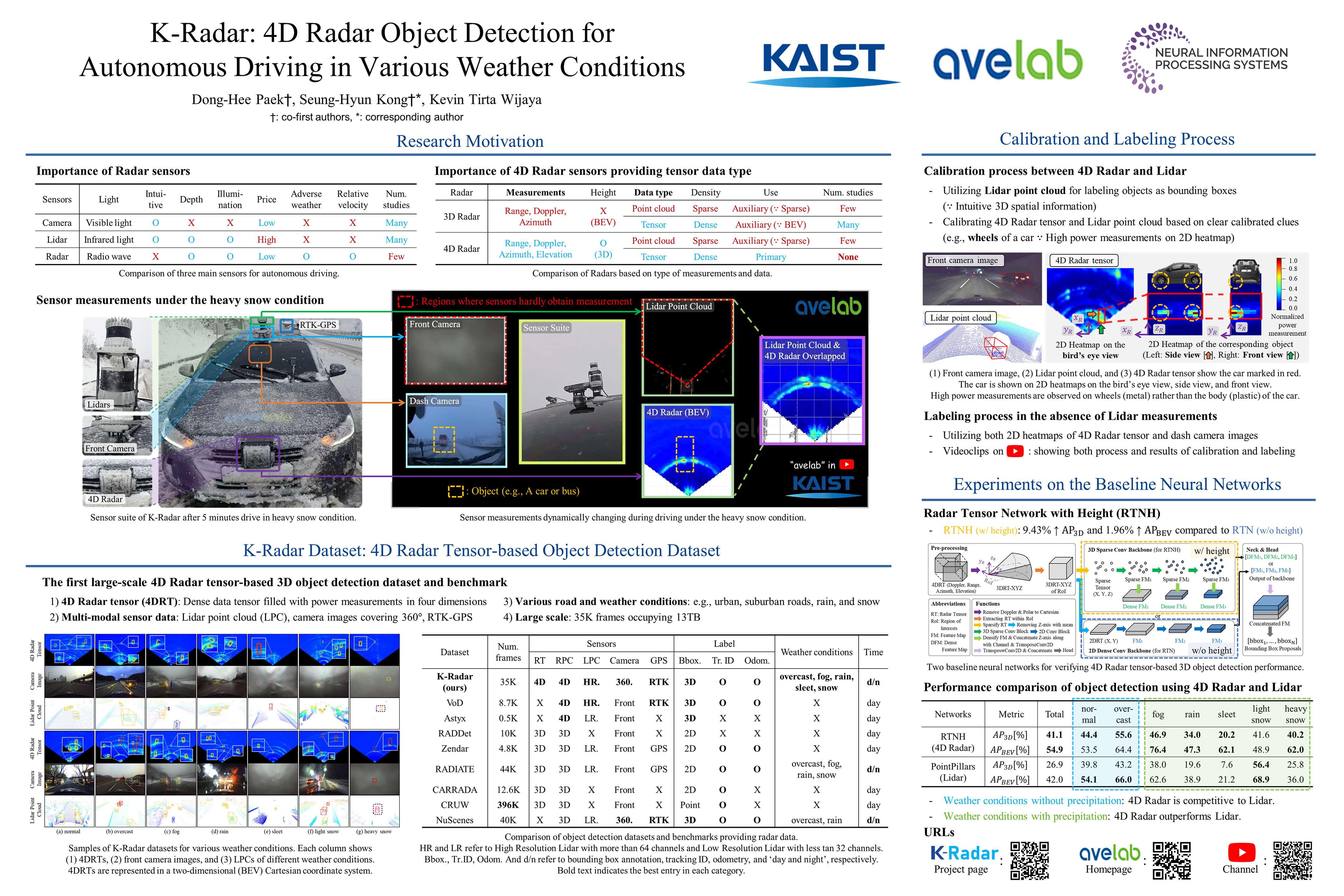
Unlike RGB cameras that use visible light bands (384∼769 THz) and Lidars that use infrared bands (361∼331 THz), Radars use relatively longer wavelength radio bands (77∼81 GHz), resulting in robust measurements in adverse weathers. Unfortunately, existing Radar datasets only contain a relatively small number of samples compared to the existing camera and Lidar datasets. This may hinder the development of sophisticated data-driven deep learning techniques for Radar-based perception. Moreover, most of the existing Radar datasets only provide 3D Radar tensor (3DRT) data that contain power measurements along the Doppler, range, and azimuth dimensions. As there is no elevation information, it is challenging to estimate the 3D bounding box of an object from 3DRT. In this work, we introduce KAIST-Radar (K-Radar), a novel large-scale object detection dataset and benchmark that contains 35K frames of 4D Radar tensor (4DRT) data with power measurements along the Doppler, range, azimuth, and elevation dimensions, together with carefully annotated 3D bounding box labels of objects on the roads. K-Radar includes challenging driving conditions such as adverse weathers (fog, rain, and snow) on various road structures (urban, suburban roads, alleyways, and highways). In addition to the 4DRT, we provide auxiliary measurements from carefully calibrated high-resolution Lidars, surround stereo cameras, and RTK-GPS. We also provide 4DRT-based object detection baseline neural networks (baseline NNs) and show that the height information is crucial for 3D object detection. And by comparing the baseline NN with a similarly-structured Lidar-based neural network, we demonstrate that 4D Radar is a more robust sensor for adverse weather conditions. All codes are available at https://github.com/kaist-avelab/k-radar.