SurDis: A Surface Discontinuity Dataset for Wearable Technology to Assist Blind Navigation in Urban Environments
{kind=link}
Abstract
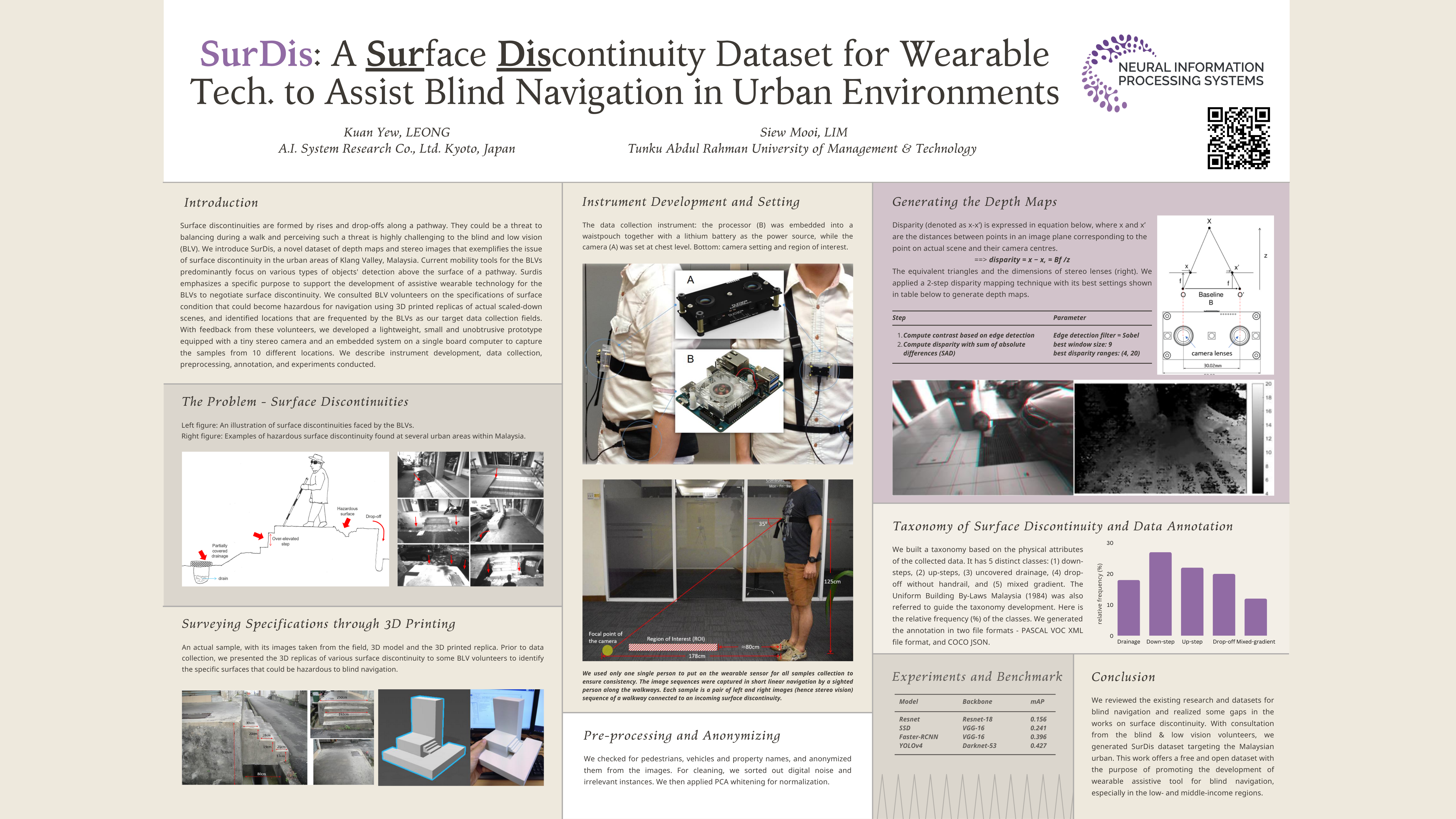
According to World Health Organization, there is an estimated 2.2 billion people with a near or distance vision impairment worldwide. Difficulty in self-navigation is one of the greatest challenges to independence for the blind and low vision (BLV) people. Through consultations with several BLV service providers, we realized that negotiating surface discontinuities is one of the very prominent challenges when navigating an outdoor environment within the urban. Surface discontinuities are commonly formed by rises and drop-offs along a pathway. They could be a threat to balancing during a walk and perceiving such a threat is highly challenging to the BLVs. In this paper, we introduce SurDis, a novel dataset of depth maps and stereo images that exemplifies the issue of surface discontinuity in the urban areas of Klang Valley, Malaysia. We seek to address the limitation of existing datasets of such nature in these areas. Current mobility tools for the BLVs predominantly focus on furniture, indoor built environments, traffic signs, vehicles, humans and various types of objects' detection above the surface of a pathway. We emphasize a specific purpose for SurDis – to support the development of assistive wearable technology for the BLVs to negotiate surface discontinuity. We consulted BLV volunteers on the specifications of surface condition that could become hazardous for navigation using 3D printed replicas of actual scaled-down scenes, and identified locations that are frequented by the BLVs as our target data collection fields. With feedback from these volunteers, we developed a lightweight, small and unobtrusive prototype equipped with a tiny stereo camera and an embedded system on a single board computer to capture the samples from 10 different locations. We describe instrument development, data collection, preprocessing, annotation, and experiments conducted. The dataset contains: (1) more than 17000 depth maps generated from 200 sets of stereo image sequences, (2) annotations of surface discontinuity in the depth maps, and (3) bitmap stereo image pairs corresponding to the depth maps in (1).